Курсовая работа: Разработка электропривода моталки для свертывания металлической полосы в рулоны
![]()
Статическая механическая характеристика привода при частотно-токовом управлении, в области скольжений меньше 1,5 Sном описывается следующей зависимостью:
![]() ,
,
Где —жесткость механической характеристики. Определяется по формуле:
![]()
Видно, что механическая характеристика имеет линейный вид. Также для расчета необходимо найти максимальное значение момента с точки зрения нагрева. При этом учтем то, что машина является перегруженной:
Мmax =Мном *![]() *1,4=98,2*1,6=157 Н*м
*1,4=98,2*1,6=157 Н*м
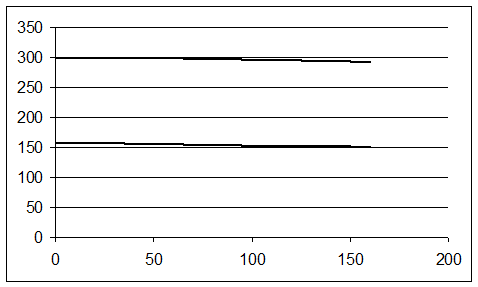
Рисунок 5.1—Механическая характеристика привода
Электромеханическая характеристика также будет линейна, т.к. при частотно-токовом управлении момент прямопропорционален току. Зависимость между моментом и током можно найти для номинальной точки.
![]() А
А
![]()
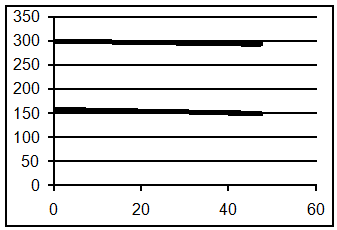
Рисунок 5.2—Электромеханическая характеристика.
6. Расчет переходных процессов в электроприводе за цикл работы
Для расчета регуляторов необходимо рассчитать коэффициенты передачи датчиков обратных связей. Будем считать, что датчики линейны и не входят в насыщение. Максимальное выходное напряжение датчика примем равным 10 В. Тогда коэффициент передачи рассчитывается как отношение максимального выходного напряжения к максимальному значению контролируемого параметра.
- Кдс =10/320=0,0313 В*с/рад;
- Кдн =10/2000=0,05 В/Н.
При синтезе упростим модель привода:
- Вследствие того, что момент инерции в процессе намотки изменяется в 16 раз, то для регулятора скорости момент инерции примем в 4 раза больше начального. Это повысит быстродействие при выборе провисания и выходе в режим с номинальным натяжением;
- Будем считать, что натяжение возникающее в ленте прямо пропорционально удлинению;
- Также будем считать, что радиус барабана не изменяется. Примем равным начальному значению. Это повысит быстродействие контура натяжения.
Расчет регулятора момента
Для получения наилучших динамических свойств, функциональный преобразователь должен быть реализован в силовом преобразователе.
Структурная схема контура момента с регулятором представлена на рисунке 6.1. Регулирование момента производим с помощью положительной обратной связи по скорости.
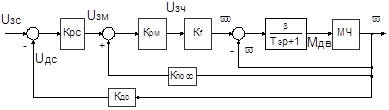
Рисунок 6.1—Контур момента
В статике:
М=(Kf *KР M *Uз +Kf *KР M *KПОСС *
Отсюда получается система уравнений: