Курсовая работа: Разработка электропривода моталки для свертывания металлической полосы в рулоны
Передаточная функция регулятора натяжения, настроенного на модульный оптимум при двукратно интегрирующем контуре натяжения, будет иметь вид:
![]()
Регулятор натяжения представлен в виде ПИ-регулятора.
При моделировании системы учтем нелинейности регуляторов, а также зависимость параметров механической части от радиуса барабана, который в свою очередь зависит от количества оборотов барабана.
Механическая часть имеет следующий вид:
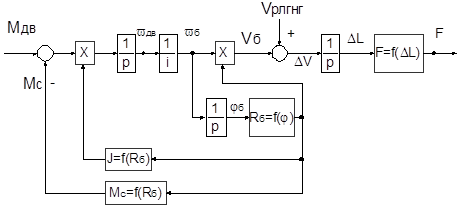
Рисунок 6.3—Механическая часть электропривода
В первую очередь необходимо рассчитать текущий радиус барабана. Для этого находим угол поворота барабана. Зависимость между радиусом и количеством оборотов имеет следующий вид:
![]() ,
,
где 0,005—толщина наматываемой ленты (хотя в реальном механизме намотать 5-ти миллиметровую металлическую пластину не так просто).
—угол поворота барабана.
После определения радиуса находим момент инерции. Он складывается из двух частей—приведенного момента инерции механизма и момента инерции рулона. Момент инерции рулона определяется как момент инерции кольца.
Далее находим момент трения. С учетом того, что в конце намотки сила трения увеличивается вдвое, то эта зависимость имеет следующий вид:
Далее находим полезный момент. Он равен произведению силы натяжения на радиус барабана.
Сила натяжения в свою очередь зависит от удлинения возвратной пружины. Рабочий ход датчика натяжения принят равным 1 метру. Тогда при провисании больше двух метром натяжение равно нулю. При провисании равном нулю сила натяжения равна произведению упругости полосы на удлинение. Упругость полосы намного больше упругости возвратной пружины, поэтому в этом случае ударный момент (что не является его рабочим режимом).
При намотке необходимо сначала разогнаться до пониженной скорости. Для этого в системе введён сигнал «Вкл.». Моделирует сигнал от датчика поступления полосы на барабан. В начальный момент он отключает регулятор натяжения и подает на вход регулятора скорости сигнал для разгона на пониженную скорость.
Аналогично действуют сигнал «Стоп». Он предназначен для торможения барабана после намотки. Как было сказано выше, барабан не затормозится под действием только момента холостого хода. При этом на регулятор скорости подается нулевое задающее напряжение.
Моделирование системы произведено в пакете Matlab. Структурная схема и графики переходных процессов представлены в графической части проекта.
7. Проверка правильности расчета мощности и окончательный выбор двигателя
Для проверки правильности выбора двигателя воспользуемся методом эквивалентного тока. По данному методу измеряется среднеквадратичное значение тока за цикл. Этот ток не должен превышать номинальный ток двигателя. Также должна обеспечиваться загрузка привода более, чем на 75%.
 <Iном
<Iном
При частотно-токовом управлении ток пропорционален моменту. Поэтому на модели измеряем текущий момент, делим его на номинальный и умножаем на номинальный ток. Так получим текущий ток. Возводим его в квадрат и подаем на интегратор. В конце цикла работы интегратор покажет значение интеграла. Получены следующие значения:
![]()
Найдем загрузку двигателя:
![]()
Видно, что двигатель не догружен до требуемого значения. Однако, двигатель меньшей мощности (11 кВт) составляет 73% от используемого. Это значит, что двигатель будет перегружен, что приведет к выходу его из строя. Также двигатель меньшей мощности не обеспечит требуемых динамических показателей: при переходе с повышенной скорости на рабочую нужен большой момент. Если его не обеспечить, то система начнет «раскачиваться» и в ней появятся возрастающие колебания.
Поэтому, оставляется выбранный двигатель.
8 Разработка схемы электрической принципиальной
8.1 Разработка схемы силовых цепей, цепей управления и защиты
Силовая цепь состоит из следующих элементов: автоматический выключатель, преобразователь, двигатель.
Автоматический выключатель обеспечивает защиты от токов короткого замыкания. Тепловая защита встроена в преобразователь.