Курсовая работа: Разработка электропривода моталки для свертывания металлической полосы в рулоны
Из второго уравнения системы находим КРМ :
![]() 0,0289
0,0289
Регулятор момента представляется в виде П-регулятора.
Из первого уравнения находим коэффициент положительной обратной связи по скорости:
![]() = 1.0821
= 1.0821
Расчет регулятора скорости.
Для расчета контура скорости представим контур момента в виде звена:
*Kf *KM *KПОСС -1Kf *KM *UЗ *(Э р+1)*М
Kf *KM *UЗ *=(Э р+1)*М
КМ = Kf *KM *
![]()
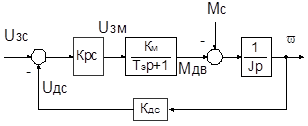
Рисунок 6.2—Контур тока с оптимизированным контуром скорости
Передаточная функция регулятора скорости имеет вид:
![]() ,
,
где Т =Тэ —малая постоянная времени;
а=1—коэффициент демпфирования
Для определения передаточной функции объекта компенсации необходимо записать передаточную функцию разомкнутого контура скорости без учета регулятора и звеньев с малыми постоянными времени:
![]() ,
,
Тогда передаточная функция регулятора скорости будет иметь вид:
![]() =104
=104
Регулятор скорости представлен в виде П-регулятора.
Расчет регулятора натяжения.
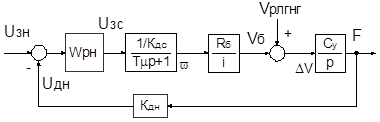
Рисунок 6.3—Контур натяжения с оптимизированным контуром скорости
Передаточная функция объекта компенсации контура натяжения имеет вид:
![]() ,
,
где RБ —радиус барабана.
СУ —коэффициент упругости ленты. Равен половине жесткости возвратной пружины.