Курсовая работа: Разработка и проектирование робота для разминирования
ИЛИ последовательный интерпретатор команд;
ИЛИ библиотеки C++ Linux для управления из произвольного приложения linux+rtai на базовом компьютере;
Робот способен самостоятельно передвигаться, как и с помощью контроля компьютером. Предназначен для разминирования технических обьектов.
2.1 Рука робота
Вполне вероятно, что в один прекрасный день робот получит широкое распространение. Механическая рука, прикрепленная к корпусу (туловищу), снабженная видеокамерами и специальным рабочим органом, которым может сделан захват какого-нибудь инструмента, например щипцы. Рука приводится в движение электрическим приводом в заранее запрограммированной последовательности движений под управлением контроллера (управляющего устройства), который основан на микропроцессоре и способен определять положение руки благодаря устройствам обратной связи в каждом узле.
Робот программируется оператором, передвигая руку в нужной последовательности либо путем воспроизведения этой последовательности с помощью устройства дистанционного управления. Этот образец робота оснащен сенсорной обратной связью и способен реагировать на происходящее в непосредственной близости от него.
Тем не менее его можно уподобить человеку, который слеп, глух, нем. Но несмотря на эти «невероятные увечья» робота надеюсь внесёт выдающийся вклад в производство. Однако это станет возможным только благодаря тому, что среда, в которой он работает, вплоть до нашего времени специально «строилась» для него.
2.2 Голова робота
Головой робота являются 2 видеокамеры, угол обзора которых 160 градусов, на которых установлены сенсоры скорости. На шее установлен электродвигатель, позволяющий осуществлять поворот головы, для боле лучшего обзора. Это конструкция позволяет упростить строение робота и уменьшить затраты на его производство.
2.3 Корпус робота
Корпус робота сделан из титана и различных металлических сплавов. Внутри расположены двигатели поворота, а так же взаимодействия частей всего робота, тепловые датчики, управляющий микропроцессор. По сути корпус является самым важным элементом нашего проекта. На нем расположены дополнительные защитные металлические пластины. Это позволяет защитить микропроцессор с различными управляющими элементами от нежелательных последствий и укрепить состояние всего робота.
3.3 Программное обеспечение
Программное обеспечение предоставлено компанией Apple.
3.4 Пример шагающего аппарата
Шагающий аппарат содержит корпус, снабженный 2 ногами. В центре корпуса расположен гироскопический датчик, сообщающий системе управления информацию об ориентации корпуса по отношению к вектору силы тяжести; в передней части укреплен оптический дальномер, доставляющий информацию о поверхности, по которой перемещается шагающий робот. Внутри корпуса размещается микропроцессорная система управления и силовая часть.
Каждая конечность имеет три степени свободы, и приводится в действие с помощью двигателя с механизмом (передача, коробка передач, редуктор).
В нижней части конечности находятся три датчика усилия для измерения реакции силы ноги.
Основные характеристики шагающего аппарата:
· высота корпуса – 10 см; · длина стороны – 17 см;
· общая масса – 21 кг; · размер конечности – 45,6 см;
· масса конечности – 2.8 кг; · масса корпуса с микропроцессором – 3,8 кг;
· скорость – около 0,4 км/ч; ·полезная нагрузка – 5 кг;
· длина бедра – 20,4 см; · длина голени – 25,2 см;
· поверхность касания конечности – 28,3 см2
3 Технические расчеты
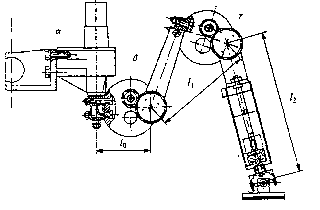
Попытаемся произвести некоторые расчеты движения руки, ее координирования и различных сил действующих на нее.
Таким образом, вычисления во время рабочего режима при каждом периоде выборки включают в себя только вычисление сил и моментов, развиваемых приводами, но не включает преобразований из декартовой системы координат в пространство присоединенных переменных. Следовательно, возможно увеличение частоты выборки.
Пусть положение системы координат описывает однородная матрица Н(t), размерностью (4x4):