Курсовая работа: Разработка и проектирование робота для разминирования
wCj – ограничение по ускорению для j-го сочленения,
JCj – ограничение по скорости изменения ускорения для j-го сочленения.
Qji (t) – кубический полином, описывающий поведение j-й присоединенной переменной между узловыми точками i и i+1, т.е. между Hi и Hi +1 .
wji – ускорение в Hi ; оно соответствует Qji ’’(ti ) если Qji (t) проходит через Hi в момент времени ti .
X=(h1 , h2 ,…, hn -1 ),- вектор временных интервалов.
Задачу можно сформулировать следующим образом: минимизировать целевую функцию Т
![]()
при следующих ограничениях:
![]() , j=1,2,…, N, i=1,2,…,n-1,
, j=1,2,…, N, i=1,2,…,n-1,
![]() , j=1,2,…, N, i=1,2,…,n-1,
, j=1,2,…, N, i=1,2,…,n-1,
![]() , j=1,2,…, N, i=1,2,…,n-1.
, j=1,2,…, N, i=1,2,…,n-1.
Строгое представление этих ограничений представлено ниже.
а) Ограничение по скорости.
![]() , j=1,2,…, N, i=1,2,…,n-1,
, j=1,2,…, N, i=1,2,…,n-1,
Дифференцируя равенство (2) и заменяя Qji ’’(ti ) и Qji ’’(ti +1 ) соответственно на wji и wj , i +1 , получаем:
Qji ’(t)=wji /2hi *(ti +1 -t)2 + wji +1 /2hi *(t-ti )2 + [qj , i +1 /hi – hi wj , i +1 /6] – [qji /hi – hi wji /6],
Также Qji ’’(t) можно представить как
Qji ’’(t)= wj,i+1 /hi *(t-ti ) + wji /hi *(t-ti+1 ),
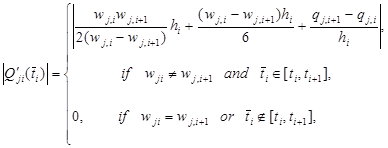
Скорость достигает своего максимального по абсолютной величине значения в одной из точек ti , ti +1 или ![]() , где
, где ![]() и Qji ’’(
и Qji ’’(![]() )=0. Ограничение по скорости тогда принимает вид :
)=0. Ограничение по скорости тогда принимает вид :
![]()
для i=1,2,…,n-1j=1,2,…,N, (6)
где


И
б) Ограничения по ускорению:
![]() , j=1,2,…, N, i=1,2,…,n-1,
, j=1,2,…, N, i=1,2,…,n-1,
Между двумя узловыми точками ускорение линейно зависит от времени. Поэтому максимальная абсолютная величина ускорения достигается в точке ti или в точке ti +1 и равна максимальной из величин ![]() .С учетом этого ограничение по ускорению принимает следующий вид:
.С учетом этого ограничение по ускорению принимает следующий вид: