Курсовая работа: Рух механічної системи із двома ступенями волі
Теорема про зміну кінетичного моменту формулюється в такий спосіб: повна похідна за часом від вектора кінетичного моменту механічної системи щодо деякого нерухливого центра ![]() по величині й напрямку дорівнює головному моменту зовнішніх сил, прикладених до механічної системи, певному щодо того ж центра:
по величині й напрямку дорівнює головному моменту зовнішніх сил, прикладених до механічної системи, певному щодо того ж центра:
![]() (3.1.2)
(3.1.2)
Тут ![]() – кінетичний момент механічної системи щодо нерухливого центра
– кінетичний момент механічної системи щодо нерухливого центра ![]() ; він є мірою руху системи навколо цього центра й складається з кінетичних моментів всіх крапок і тіл, що входять у цю систему;
; він є мірою руху системи навколо цього центра й складається з кінетичних моментів всіх крапок і тіл, що входять у цю систему; ![]() – головний момент зовнішніх сил щодо нерухливого центра
– головний момент зовнішніх сил щодо нерухливого центра ![]() .
.
Визначимо головний момент зовнішніх сил:
![]() , де
, де ![]() й
й ![]() – плечі сил ваги кульки й трикутника;
– плечі сил ваги кульки й трикутника;
![]() (3.1.3)
(3.1.3)
Визначимо кінетичний момент системи. Він складається з кінетичних моментів кульки й трикутника: ![]() .
.
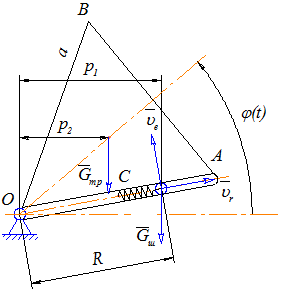
Малюнок 3.1.1. Складання рівняння руху твердого тіла за допомогою теореми про зміну кінетичного моменту
![]() , де модуль переносної швидкості дорівнює
, де модуль переносної швидкості дорівнює ![]() .
.
![]() (3.1.4)
(3.1.4)
![]() ,
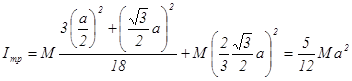
, ![]() – момент інерції трикутника
– момент інерції трикутника ![]() щодо шарніра
щодо шарніра ![]() . Визначимо його по теоремі Штейнера:
. Визначимо його по теоремі Штейнера:
 (3.1.5)
(3.1.5)
![]() (3.1.6)
(3.1.6)
З огляду на (3.1.4) і (3.1.6), кінетичний момент системи дорівнює:
![]() (3.1.7)
(3.1.7)
Диференціюємо вираження (3.1.7):
![]() (3.1.8)
(3.1.8)
Підставивши знайдені значення в (3.1.2), теорема про зміну кінетичного моменту прийме вид:
![]() (3.1.9)
(3.1.9)
3.2 Визначення закону зміни зовнішнього моменту, що забезпечує сталість кутової швидкості
При дії зовнішнього моменту ![]() , що забезпечує рівномірне обертання механічної системи навколо шарніра
, що забезпечує рівномірне обертання механічної системи навколо шарніра ![]() , остання доданок у лівій частині рівності (3.1.9) звертається в нуль:
, остання доданок у лівій частині рівності (3.1.9) звертається в нуль:
![]() ,
, ![]() ; звідси
; звідси ![]() .
.
Тоді вираження (3.1.9) прийме вид:
![]() (3.2.1)
(3.2.1)
![]() спрямований протилежно головному моменту зовнішніх сил, тобто, проти годинникової стрілки.
спрямований протилежно головному моменту зовнішніх сил, тобто, проти годинникової стрілки.
Зовнішній момент, що забезпечує рівномірне обертання конструкції, дорівнює:
![]() (3.2.2)
(3.2.2)
4. Визначення реакцій в опорах обертового тіла