Курсовая работа: Синтез системы автоматического управления непрерывным объектом
Re=real(Z);Im=imag(Z);
W1=tf([0.9],[20 1],'td',1);
W12=tf([1],[500 100 1],'td',15);
W2=W1*W12
figure(1);nyquist(W2);
hold on
figure(1);plot(Re,Im)


Рис. 26 Анализ точки пересечения АФЧХ линейной и нелинейной части системы
Из рис 26. мы определяем координату по вещественной оси точки пересечения амплитудно-фазовой характеристики линейной части и графической зависимости нелинейной части системы управления:
![]()
В соответствии с критерием Найквиста
![]()
![]()
Рассчитаем параметр с:

Амплитуду гармонических колебаний принимаем равным значению желаемой установившейся ошибки. После расчёта получаем значение параметра
![]()
Построим в Simulink релейный регулятор с найденными параметрами ![]()
clc;
clear;
c=0.177;
C1=1/0.9+c;
C2=1/0.9-c;
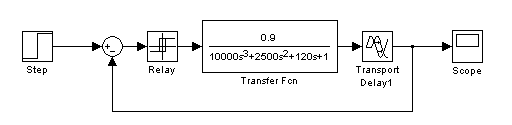
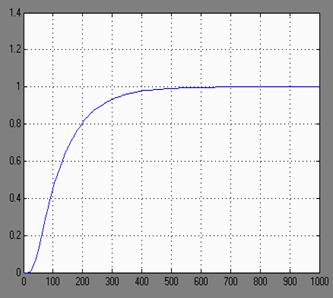
Рис.27. Моделирование нелинейного регулятора
Получим следующий график