Курсовая работа: Синтез системы автоматического управления непрерывным объектом
Поведение системы с дискретным компенсатором
Модель системы с оптимальным регулятором
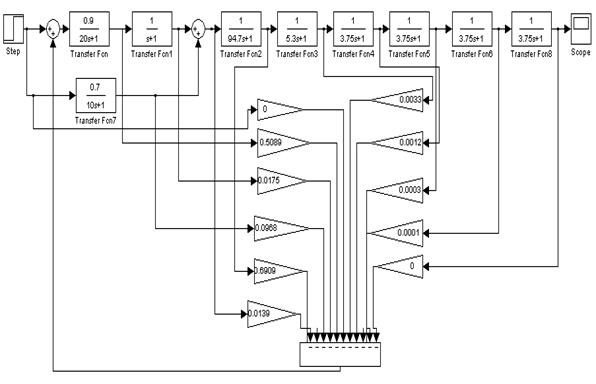
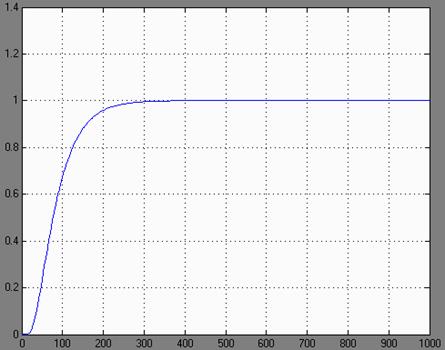
Получим следующий график переходного процесса
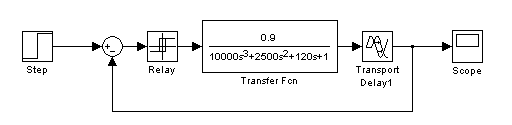
Моделирование нелинейного регулятора
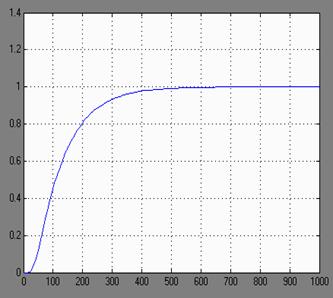
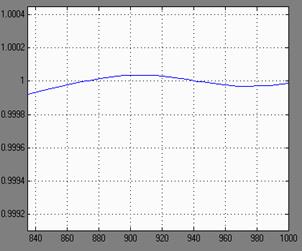
Переходный процесс при использовании нелинейного регулятора
Заключение
В данной курсовой работе был выполнен расчет дискретного регулятора, обеспечивающего максимальную скорость переходного процесса. Предварительно система была переведена в дискретный вид.
Далее был рассчитан дискретный компенсатор возмущающего воздействия. Для системы также был разработан оптимальный регулятор по переменным состояния и рассчитан наблюдатель состояния этих переменных.
Следует отметить, что оптимальные системы крайне чувствительны к возмущениям, кроме того, наблюдатель должен обладать быстродействием в 2-4 раза более высоким, чем остальная часть системы, что не позволяет реализовать его для высокоскоростных процессов. По этим причинам на практике оптимальные системы реализуются лишь частично.
Отметим также, что в настоящее время для целей синтеза систем автоматического регулирования используются электронные вычислительные машины, позволяющие производить полное или частичное моделирование проектируемой системы. Кроме того, все современные системы управления, в следствии всё возрастающих вычислительных и логических возможностей современных микропроцессоров, выполняются на останове цифровой техники.