Курсовая работа: Синтез системы автоматического управления непрерывным объектом
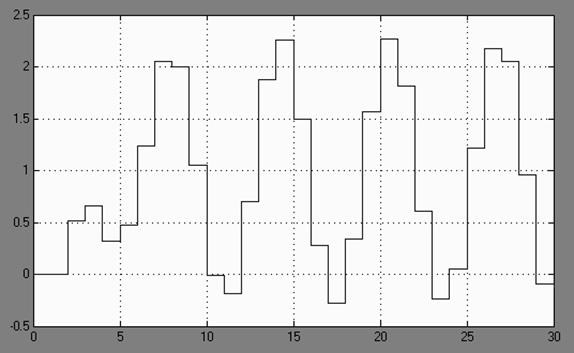
Рис.28. Переходный процесс при использовании нелинейного регулятора
Как видно из графика переходного процесса: имеют место устойчивые автоколебания, амплитуда которых не превышает значения установившейся ошибки равной 3%, заданной по заданию. Следовательно, полученный регулятор на основе нелинейного звена удовлетворяет заданным условиям.
Структура объекта с регулятором
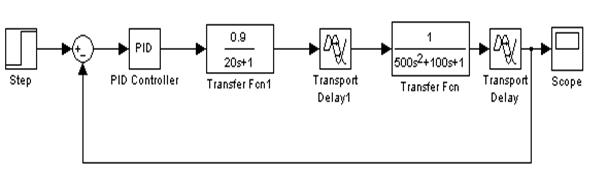
Структура системы без компенсатора
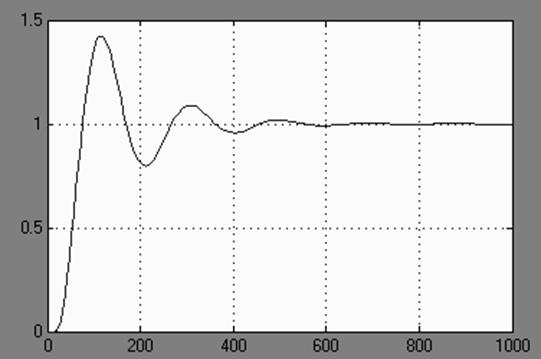
Характеристика системы будет следующей:
Поведение системы без компенсатора
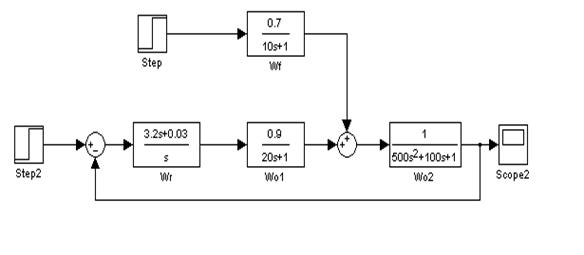
Структура системы с компенсатором
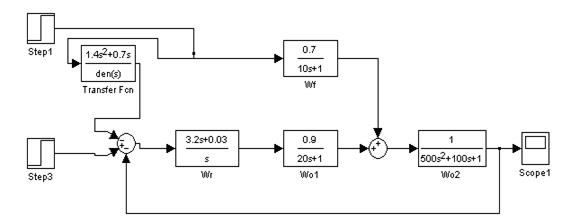
Характеристика системы будет следующей:
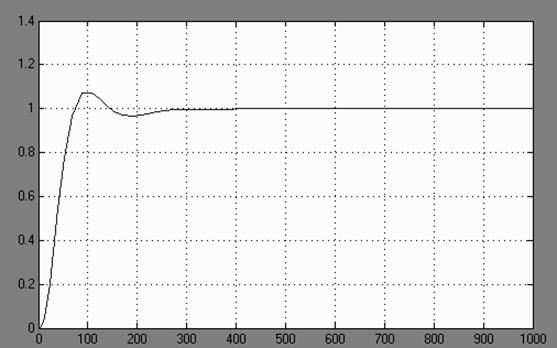
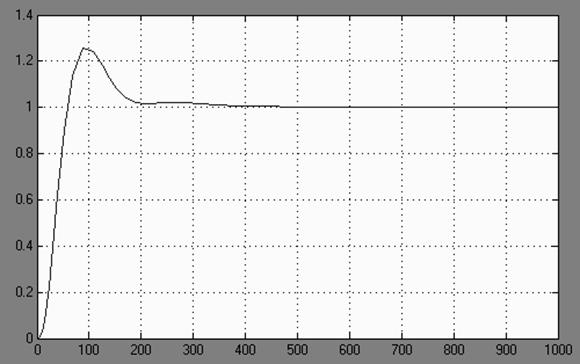
Поведение системы с компенсатором
Структура системы с дискретным регулятором
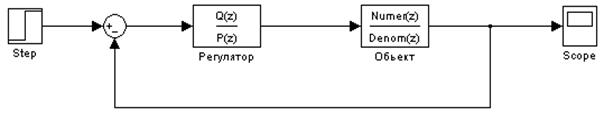
Получим следующий график:
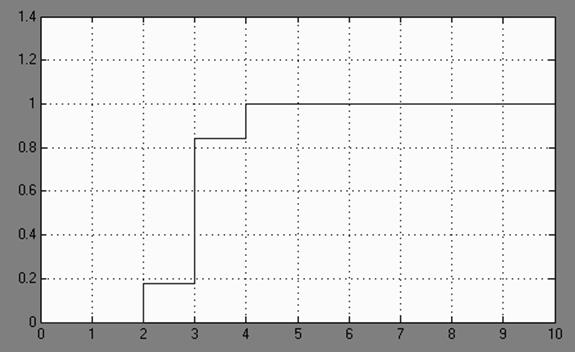
Поведение системы с дискретным регулятором
Система без дискретного компенсатора
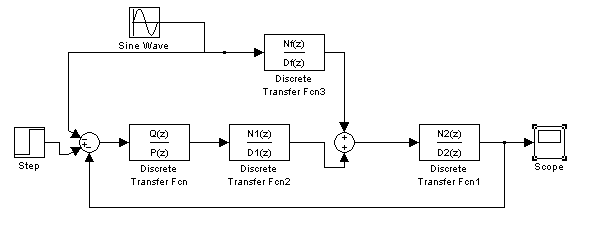
Система без дискретного компенсатора
Получим следующую характеристику:
Поведение системы без дискретного компенсатора
Система с дискретным компенсатором
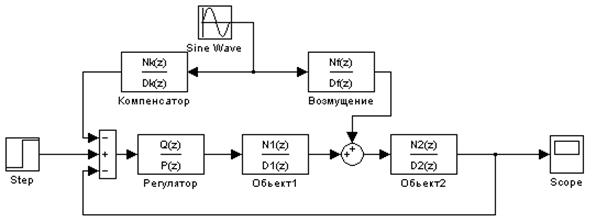
Характеристика будет следующей