Курсовая работа: Синтез системы автоматического управления непрерывным объектом
W2=tf([1],[500 100 1],'td', 15) % задаем передаточную функцию
Wob=W1*W2 % общая передаточная двух последовательных частей системы
T=1 % время квантования
Wdiskr=c2d(Wob,T,'zoh') % передаточная в дискретной области
[NumerDenom]=tfdata(Wdiskr, 'v') % коэффициенты числителя и знаменателя
m=length (Numer)
Denom1=Denom(2:m)
Numer1=Numer(2:m)
q0=1/sum(Numer1)
for i=1:(m-1)
q(i)=q0*Denom1(i)
p(i)=q0*Numer1(i)
end
Q=[q0 q] % матрица коэффициентов числителя
P=[1 -p] % матрица коэффициентов знаменателя
Wr=tf(Q, P, T) % передаточная функция регулятора
Получим значение передаточной функции дискретного регулятора:
![]()
Посмотрим на поведение системы при использовании такого регулятора. Промоделируем поведение системы в Simulink’e.

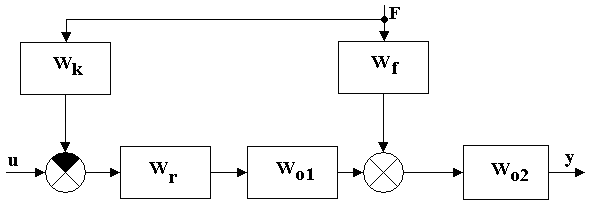
Рис. 12. Структура системы с дискретным регулятором
Получим следующий график:

Рис. 13. Поведение системы с дискретным регулятором
Как видно из полученного графика, установившаяся ошибка и время перерегулирования отсутствует. Время регулирования составляет 3 такта.
Таким образом, произведен синтез дискретного регулятора.
5. Синтез дискретного компенсатора
Систему с компенсатором можно представить в виде: