Курсовая работа: Синтез системы автоматического управления непрерывным объектом
s=i*w;
Kp=3.2;
Ki=0.03
Wob1=((0.9).*(Kp+(Ki./(s))))./(10000*s.^3+2500*s.^2+120*s+1);
re=real(Wob1);
im=imag(Wob1);
R=M/(M^2-1);
C=(M^2)/(1-M^2);
x=-1:0.00001:0.4;
y1=sqrt(R^2-(x-C).^2);
y2=-sqrt(R^2-(x-C).^2);
K=tan(asin(1/M));
y3=K*x;
plot(re, im, x,y1,x,y2,x,y3)
grid on
Изменяя значения Kp и Ki , подберем такие значения, при которых окружность одновременно касается АФЧХ и луча. Это достигается при:
![]()
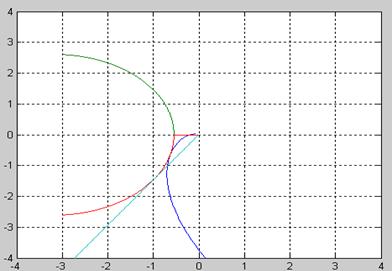
Рис. 5. Расчет ПИ-регулятора
Промоделируем систему с ![]() и
и ![]()
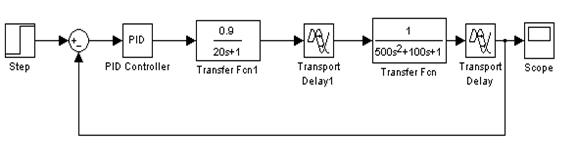
Рис.6. Структура объекта с регулятором
Получим характеристику:
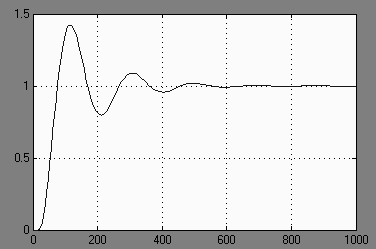
Рис. 7. Поведение непрерывного объекта с ПИ-регулятором
При использовании данного регулятора точность составит
![]()
что удовлетворяет заданному условию
![]()