Курсовая работа: Синтез системы автоматического управления непрерывным объектом
Рис. 1. Структура системы управления
Преобразование системы в дискретную область и выбор периода квантования будем проводить с помощью Matlab’а.
Чтобы обеспечить заданную погрешность аппроксимации менее 10%, нужно выбрать период квантования так, чтобы он составлял не более 10% от постоянной времени Т.
Также, при выборе преиода квантования нужно учитывать значение запаздывания.Выберем период квантования, равным 0.5.
|
W1=tf([0.9],[20 1],'td',1) % задаем передаточную функцию W2=tf([1],[500 100 1],'td',15) % задаем передаточную функцию Wob=W1*W2 % общая передаточная двух последовательных частей системы T=0.5 % время квантования Wdiskr=c2d(Wob,T,'zoh') % передаточная в дискретной области |
Получим значение передаточной функции дискретной системы:
![]()
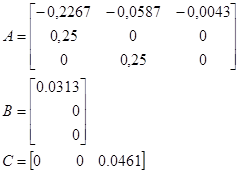
Найдем описание объекта в пространстве состояний с помощью Matlab’а.
![]()
|
W1=tf([0.9],[20 1],'td',1) % задаем передаточную функцию W2=tf([1],[500 100 1],'td',15) % задаем передаточную функцию Wob=W1*W2 % общая передаточная двух последовательных частей системы [A, B, C]=ssdata(Wob) % матрицы в пространстве состояний |
Получим значения матриц:
2. Синтез непрерывного регулятора
На практике, применяются следующие регуляторы:
П-регулятор.
Регулятор перемещает регулирующий орган пропорционально отклонению регулируемой величины от заданного значения:
![]()
k – коэффициент передачи П-регулятора.
И-регулятор.
Регулятор перемещает регулирующий орган пропорционально интегралу от отклонения регулируемой величины:
![]()
Коэффициент пропорциональности k, численно равный скорости перемещения регулирующего органа при отклонении регулируемой величины на единицу ее измерения, называется коэффициентом передачи И-регулятора.