Курсовая работа: Синтез системы автоматического управления непрерывным объектом
![]() и
и ![]()
Передаточная функция такого регулятора имеет вид:
![]()
3. Синтез компенсатора
Для того, чтобы добиться желаемого качества процесса управления или регулирования (требуемой точности системы и качества переходного процесса), можно изменить структуру системы, введя дополнительные звенья корректирующие устройства (компенсаторы).
Основная задача компенсаторов состоит в улучшении точности системы и качества переходных процессов.
Систему с компенсатором можно представить в виде:
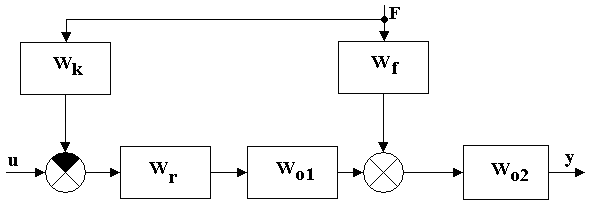
Рис. 8. Система с компенсатором
Рассчитать компенсатор можно следующим образом:
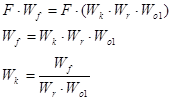
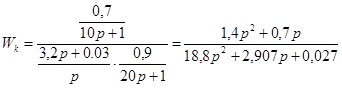
Условие физической реализуемости компенсатора соблюдено – степень числителя не превышает степень знаменателя.
Промоделируем в Simulink систему без учёта компенсатора
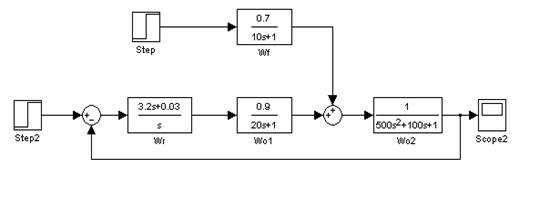
Рис. 9. Структура системы без компенсатора
Характеристика системы будет следующей
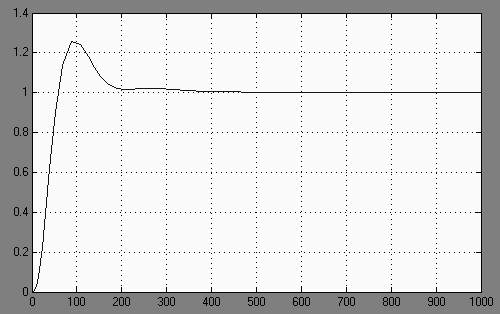
Рис. 10. Поведение системы без компенсатора
Промоделируем в Simulink систему с учётом компенсатора
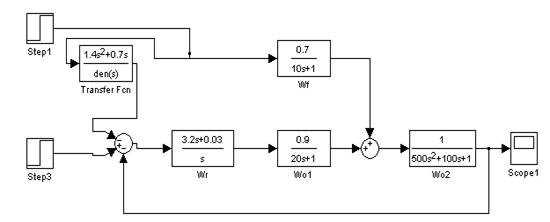
Рис. 11. Структура системы с компенсатором
Характеристика системы будет следующей
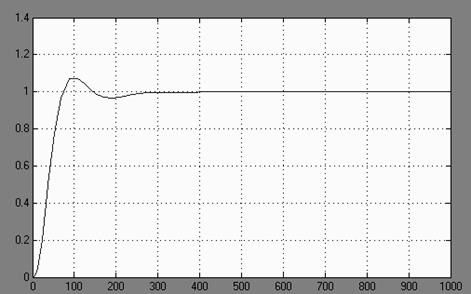
Рис. 12. Поведение системы с компенсатором
Характеристики систем
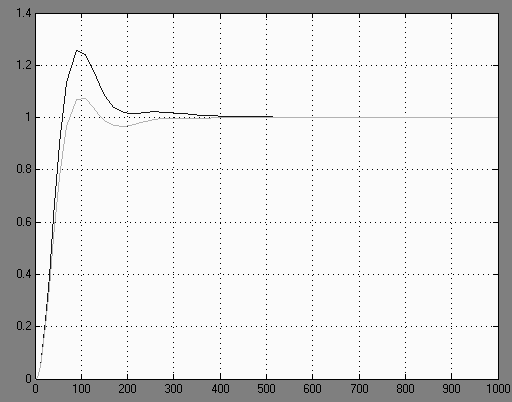
Рис. 13.
Из Рис. 13 делаем вывод : компенсатор снизил возникшую при введении в систему внешнего воздействия ошибку.