Курсовая работа: Система автоматического управления регулируемым электроприводом
175,5
120
60,95
0
![]()
343,4
338,1
322,2
296,4
268,3
218
167,9
112,4
53,34
-
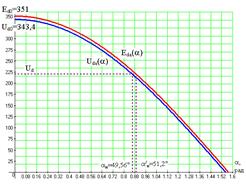
Рисунок 1.4.1 – Регулировочные характеристики преобразователя при условном холостом ходе Еdα =f(α) и номинальной нагрузке электродвигателя Udα =f(α)
Начальный (минимальный) угол регулирования:
![]() ,
,
![]() .
.
Динамический запас по напряжению:
![]() .
.
Характеристика “вход - выход” преобразователя ЕТП =f (UУ ) строится по известной регулировочной характеристике системы управления тиристорами ![]() = f (UУ ) (рисунок 1.2) и по регулировочной характеристике Ed= f (
= f (UУ ) (рисунок 1.2) и по регулировочной характеристике Ed= f (![]() ) (рисунок 1.1) путем последовательного перестроения.
) (рисунок 1.1) путем последовательного перестроения.
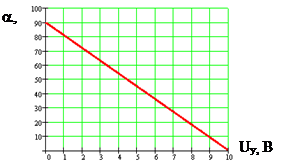
Рисунок 1.4.2 – Зависимость ![]() = f (UУ ) преобразователя
= f (UУ ) преобразователя
Общий вид зависимости EТП = f (UУ ) приведен на рисунке 1.4.3.

Рисунок 1.4.3 – Характеристика “вход - выход” преобразователя ЕТП =f (UУ )
Значение ![]() определяем исходя из заданного диапазона регулирования:
определяем исходя из заданного диапазона регулирования: