Курсовая работа: Система автоматического управления регулируемым электроприводом
0
IH
2IH
![]()
113,54
83,78
34,02
124,24
74,48
24,72
99,52
49,76
0

Рисунок 2.1.2 – Электромеханические характеристики двигателя при питании от тиристорного преобразователя в разомкнутой системе регулирования
Жесткость характеристик:
![]() .
.
Статизм характеристик:
![]() .
.
2.2 Составление расчетной функциональной схемы РЭП и определение входных параметров (![]() )
)
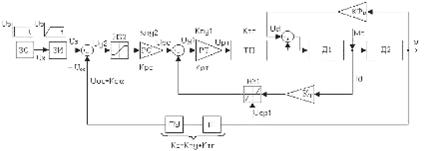
Расчетная функциональная схема РЭП показана на рисунке 2.2. На схеме приняты следующие обозначения: ЗС – задатчик скорости; ЗИ – задатчик интенсивности; ![]() – напряжение задания;
– напряжение задания; ![]() – напряжение управления во внешнем контуре, определяемое разностью между
– напряжение управления во внешнем контуре, определяемое разностью между ![]() и сигналом обратной связи по скорости
и сигналом обратной связи по скорости ![]() ; НЗ2 – нелинейное звено в регуляторе скорости – зона насыщения;
; НЗ2 – нелинейное звено в регуляторе скорости – зона насыщения; ![]() – напряжение сравнения в зоне насыщения; РС – регулятор скорости;
– напряжение сравнения в зоне насыщения; РС – регулятор скорости; ![]() – коэффициент усиления регулятора скорости;
– коэффициент усиления регулятора скорости; ![]() – выходное напряжение регулятора скорости;
– выходное напряжение регулятора скорости; ![]() – напряжение управления во внутреннем контуре, определяемое разностью между
– напряжение управления во внутреннем контуре, определяемое разностью между ![]() и разностным значением сигнала обратной связи по току и опорным напряжением в НЗ1; РТ – регулятор тока;
и разностным значением сигнала обратной связи по току и опорным напряжением в НЗ1; РТ – регулятор тока; ![]() – выходное напряжение регулятора тока; ТП – тиристорный преобразователь;
– выходное напряжение регулятора тока; ТП – тиристорный преобразователь; ![]() – напряжение на выходе тиристорного преобразователя; Д1 – статорная часть электродвигателя;
– напряжение на выходе тиристорного преобразователя; Д1 – статорная часть электродвигателя; ![]() – момент сопротивления;
– момент сопротивления; ![]() – ток двигателя; Д2 – якорная часть двигателя; ДТ – датчик тока; НЗ1 – нелинейное звено в контуре тока – зона нечувствительности;
– ток двигателя; Д2 – якорная часть двигателя; ДТ – датчик тока; НЗ1 – нелинейное звено в контуре тока – зона нечувствительности; ![]() – угловая скорость;
– угловая скорость; ![]() – напряжение сравнения в контуре тока; ТГ – тахогенератор – реализует обратную связь по скорости;
– напряжение сравнения в контуре тока; ТГ – тахогенератор – реализует обратную связь по скорости; ![]() – коэффициент передачи по скорости; ПУ – промежуточный усилитель в цепи обратной связи по скорости или делитель напряжения.
– коэффициент передачи по скорости; ПУ – промежуточный усилитель в цепи обратной связи по скорости или делитель напряжения.
В схеме используется отрицательная обратная связь по скорости и отрицательная обратная связь по току с отсечкой.
Цепь обратной связи по току выполнена зоной нечувствительности ![]() , а входной каскад усилителя насыщается при
, а входной каскад усилителя насыщается при ![]() .
.
Требуемый коэффициент усиления разомкнутой системы, необходимый по соображениям заданного статизма σЗ , определяется следующим образом:
![]() ,
,
где D – заданный коэффициент регулирования скорости,
![]() - заданный перепад скорости:
- заданный перепад скорости:
![]() ;
;