Курсовая работа: Система слежения за направлением
![]()
где F ш – шумовая полоса замкнутой системы, которая находится по формуле:

где K з (ω) – Модуль коэффициента передачи замкнутой системы.
Чтобы привести данный интеграл к табличному, возьмем комплексный коэффициент передачи замкнутой системы из формулы (2.2), заменив p на j ω:
Kз (jw)=K(jw).kd /1+K(jw).kd
Найдем квадрат модуля путем умножения комплексного коэффициента передачи на комплексно сопряженный:


В этом случае выражение можно представить отношением полиномов:

Где полиномы:

где коэффициенты полиномов равны:
![]()
Интеграл (3.4) сводится к табличному :
![]()
где I 2 равно:

Для n = 3 получаем:
 (3.8)
(3.8)
Подставив, получаем формулу для вычисления шумовой полосы:
![]() (3.9)
(3.9)
Дисперсия шумовой ошибки будет равна:
![]()
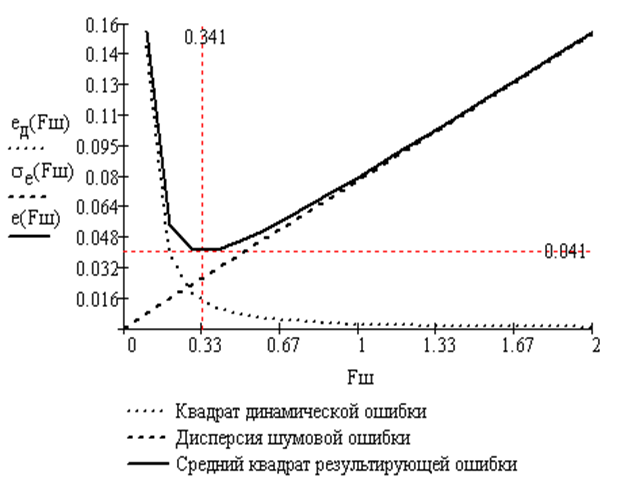
Средний квадрат результирующей ошибки:

Оптимальное значение шумовой полосы и минимально достижимую ошибку слежения находим из графика 3- зависимости ошибок слежения от полосы пропускания системы: