Курсовая работа: Система слежения за направлением

Рисунок 4 - График зависимости ЛФХ разомкнутой системы
Запас по фазе неудовлетворительный т.к. характеристика пересекается с нулем по асимтоте -40дб/дек , поэтому изменим Кu, для обеспечения запаса по устойчивости.
Определяя запас устойчивости системы, мы увидим, что по усилению система абсолютно устойчива. Так кА ФЧХ системы асимптотически стремится к уровню -180 градусов.
А вот запас устойчивости по фазе не является достаточным. Т.к. ЛАХ пересекает 0 на ![]() , значение ФЧХ на этой частоте
, значение ФЧХ на этой частоте ![]() Град. Что не удовлетворяет условию достаточной системы
Град. Что не удовлетворяет условию достаточной системы ![]() .
.
Для обеспечения запаса устойчивости системы и для уменьшения перерегулирования, т.е. пересечения ЛАХ разомкнутой системы с осью абсцисс ![]() , было при наклоне -20дБ/дек, (установлено, что колебательность переходного процесса будет наименьшей, если
, было при наклоне -20дБ/дек, (установлено, что колебательность переходного процесса будет наименьшей, если ![]() разомкнутой системы находится на участке ЛАХ с наклоном -20дБ/дек), уменьшим
разомкнутой системы находится на участке ЛАХ с наклоном -20дБ/дек), уменьшим ![]() до величиныКu опт =0,35. Это значение было выбрано из условия
до величиныКu опт =0,35. Это значение было выбрано из условия ![]() т.к качество переходного процесса определяется главным образом участком ЛАХ с наклоном -20дБ/дек, который должен иметь протяженность не менее декады.
т.к качество переходного процесса определяется главным образом участком ЛАХ с наклоном -20дБ/дек, который должен иметь протяженность не менее декады.
Оценим значения шумовой полосы и результирующей ошибки слежения, при новом значении ![]()
![]() ,
,
![]()
![]()

![]() …Гц
…Гц

![]()
![]()
![]() 0,103
0,103
Графики ЛАХ и ЛФХ разомкнутой системы при новом значении Ku

Рисунок 5 - График зависимости ЛАХ разомкнутой системы
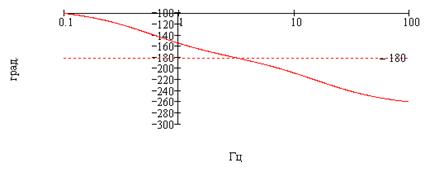
Рисунок 6 - График зависимости ЛФХ разомкнутой системы
5. Компьютерное моделирование системы, нахождение переходной характеристики, оценка качества системы в переходном режиме
Для цифрового моделирования системы воспользуемся аппаратом Z-преобразования. Для этого непрерывное интегрирование заменим дискретным по методу прямоугольников:
![]() (5.1)
(5.1)
где T – интервал дискретизации, который выбирается согласно теореме Котельникова.
Получим Z-преобразование от передаточной функции:
 ;
;
Этой передаточной функции соответствует уравнение:
 .
.