Курсовая работа: Система стабилизации скорости вращения двигателя постоянного тока
Произведем настройку контура тока на технический оптимум. Желаемая передаточная функция разомкнутого контура тока будет иметь вид:
Wркт (р) = 1/[ат ·Tтп ·p· (1 + Tтп ·p)], (5.3)
где
ат - коэффициент, который определяет демпфирование переходных процессов в контуре тока, при настройке на технический оптимум принимаем ат = 2.
Wркт (р) = 1/[2·0,013·p· (1 + 0,013·p)].
Передаточная функция регулятора тока согласно структурной схеме (рисунок 5.3) определится из условия:
Wрт (р) · [ктп / (Tтп ·p + 1)] · [кт / (Rя · (Tя ·p + 1))] = 1/[ат ·Tтп ·p· (Tтп ·p + 1)].
Преобразовав данное выражение, получим передаточную функцию регулятора тока:
Wрт (р) = [Tя ·p + 1] /Tи ·p = крт + [1/Tи ·p], (5.4)
где
Tи - постоянная времени интегрирования интегральной части регулятора тока, с:
Tи = ат ·Tтп · (ктп ·кт / Rя ) = 2·0,013· (50,0719·0, 191/0,516) = 0,482 с;
крт - коэффициент усиления пропорциональной части регулятора тока:
крт = Tя / Tи = 0,025/0,482 = 0,052.
Так как регулятор тока является ПИ - регулятором (см.5.4), то коэффициент обратной связи по току можно определить из соотношения:
кт = Uрс max / Iдоп , (5.5)
где Uрс. max - максимальное значение выходного напряжения регулятора скорости (в расчетах можно принять Uр. с. max = 10 В);
Iдоп - значение тока якоря двигателя, допустимое по условиям коммутации, А:
Iдоп = λ·Iн = 2·26,2 = 52,4 А.
кт = Uрс max / Iдоп = 10/52,4 = 0, 191.
Wрт (р) = 0,052 + [1/0,482·p].
5.3.2 Контур регулирования скорости
Контур регулирования скорости является внешним контуром по отношению к контуру тока. Рассмотрим структурную схему контура скорости электропривода (рисунок 5.4) при тех же допущениях, что и были приняты при синтезе контура тока.
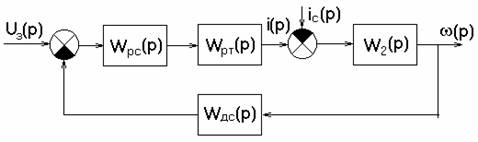
Рисунок 5.4 - Структурная схема для синтеза контура скорости
На рисунке 5.4 приняты те же обозначения, что и на рисунке 5.1, за исключением передаточной функции регулятора тока Wрт (р), которая в данном случае, с учетом (5.4), имеет вид:
Wрт (р) = [1/кт ] / [ат ·Tтп 2 ·p2 + ат ·Tтп ·p + 1].
При синтезе регулятора скорости передаточная функция замкнутого контура тока с достаточной степенью точности можно аппроксимировать выражением:
Wрт (р) = [1/кт ] / [ат ·Tтп 2 ·p2 + ат ·Tтп ·p + 1] ≈ [1/кт ] / [ат ·Tтп ·p + 1]. (5.5)
Тогда некомпенсируемой малой постоянной времени в контуре скорости является величина: