Курсовая работа: Система управления положением бортового прожектора вертолёта
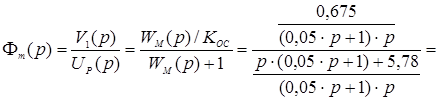
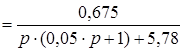
Ещё более упростим систему, записав единое уравнение для части системы, замкнутой обратной связью с коэффициентом 8,56. Для этого запишем передаточную функцию ![]() по
по ![]() (
(![]() по
по ![]() ).
).
Уравнение разомкнутой системы ![]() .
.
 ;
;
Уравнение замкнутой системы:
 .
.
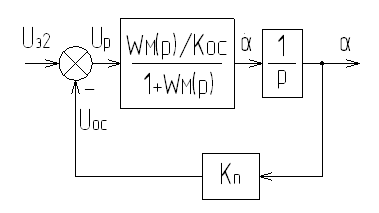
Рис.17 Упрощённая блок-схема второго канала
Запишем окончательную передаточную функцию разомкнутой системы.
![]() ;
;

 ;
;
![]() ;
;
![]() ;
;
![]() .
.
Так как ![]() , то имеем колебательное звено. Учитывая что
, то имеем колебательное звено. Учитывая что ![]() , можно пользоваться асимптотической ЛАЧХ колебательного звена.
, можно пользоваться асимптотической ЛАЧХ колебательного звена.
Находим сопрягающую частоту
![]() .
.
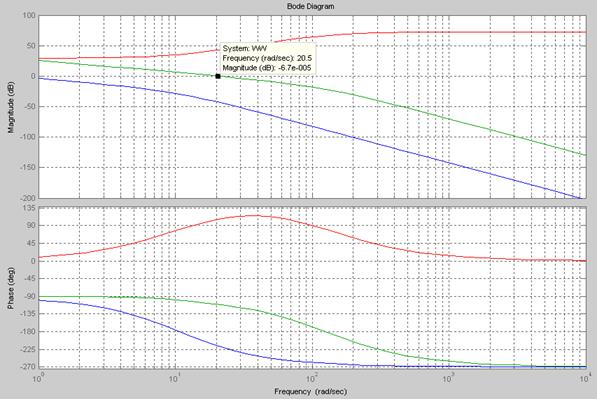
На рис. 18 представлены ЛЧХ нескорректированного второго канала.
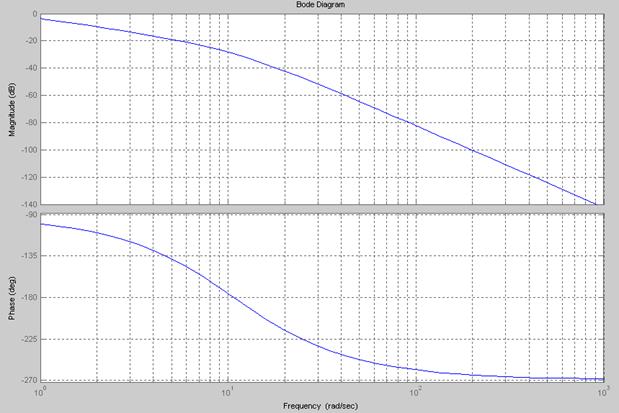
Рис. 18 ЛЧХ нескорректированного второго канала
По ЛЧХ видно что нескорректированная система второго канала устойчива, но предъявленные к систем требования по качеству не выполняются. Кривая ЛАЧХ нескорректированной системы пересекает ось абсцисс на очень низкой частоте, вследствие чего система имеет очень высокое время регулирования. Путём моделирования нескорректированной системы в среде Matlab было установлено, что время регулирования больше 4 секунд.
Как и в случае с первым каналом, рассчитаем корректирующие звенья методом синтеза последовательной коррекции.
Построенная асимптотическая ЛАЧХ находится в приложении к пояснительной записке.
Ниже представлена вычисленная передаточная функция коррекции
 .
.
На рис. 19 показаны ЛЧХ скорректированного второго канала.