Курсовая работа: Система управления положением бортового прожектора вертолёта
На рис.20 показан переходной процесс для второго канала исследуемой системы.
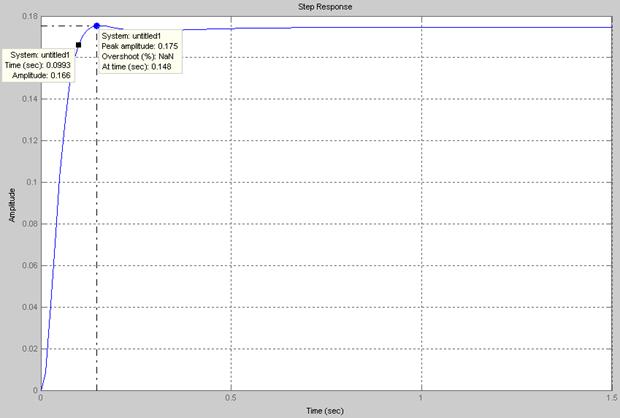
Рис. 20 Реакция на единичный скачок второго канала
Было установлено:
![]() ;
;
![]() .
.
Таким образом, можно сказать, что скорректированная система удовлетворяет всем предъявленным требованиям по качеству и быстродействию.
Рассчитаем корректирующие цепья для второго канала. Как и случае с первым каналом нам потребуется два одинаковых дифференцирующих звена и усилители.
Схема пассивного дифференцирующего звена показана на рис.12.
 ,
,
![]() ;
;
 .
.
Пусть ![]() , тогда
, тогда
 ,
,
![]() ,
,
![]() ;
;
 ,
,
![]() ;
;
![]() .
.
Рассчитаем дополнительный коэффициент усиления, требуемый для сигнала, ослабленного дифференцирующим звеном
 .
.
Рассчитаем общий коэффициент усиления рассчитанного регулятора
![]() .
.
Схемная реализация рассчитанного регулятора для второго канала будет такой же и как для первого канала и показана на рис. 13.
Распределим вычисленный коэффициент усиления регулятора по двум усилителям
![]() .
.
4. Выбор датчик ов
В качестве датчика для первого канала был выбран потенциометрический датчик угла Megatron MP20. Датчик показан на рис. 21.
