Курсовая работа: Система управления положением бортового прожектора вертолёта
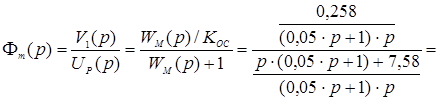
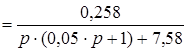
Уравнение разомкнутой системы ![]() .
.
 .
.
Уравнение замкнутой системы:
 .
.
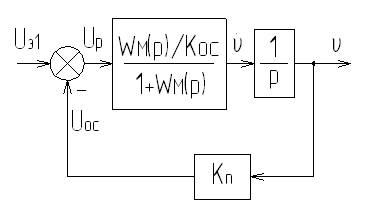
Рис.8 Упрощённая блок-схема первого канала
Запишем окончательную передаточную функцию разомкнутой системы.
![]()


![]() ;
;
![]() ;
;
![]() .
.
Так как ![]() , то имеем колебательное звено. Учитывая что
, то имеем колебательное звено. Учитывая что ![]() , можно пользоваться асимптотическими ЛЧХ колебательного звена, колебания будут малы.
, можно пользоваться асимптотическими ЛЧХ колебательного звена, колебания будут малы.
Находим сопрягающую частоту
 ;
;
![]() .
.
На рис. 9 представлены ЛЧХ нескорректированного первого канала.
Рис.9 Нескорректированные ЛЧХ первого канала
По ЛАЧХ видно, что нескорректированная система первого канала устойчива, но предъявленные к систем требования по качеству не выполняются. Кривая ЛАЧХ пересекает ось абсцисс на очень низкой частоте, вследствие чего система имеет очень высокое время регулирования. Путём моделирования нескорректированной системы в среде Matlab было установлено, что время регулирования составляет порядка 15 секунд.
Введём в исследуемую систему корректирующие звенья. Рассчитаем их методом синтеза последовательной коррекции. Найдём желаемую частоту среза, исходя из заданных времени регулирования и величины перегулирования.

Желаемую ЛАЧХ построим исходя из следующих соображений. Среднечастотный участок желаемой ЛАЧХ образуется асимптотой с наклоном ![]() , проводимый так, чтобы она пересекала ось частот при
, проводимый так, чтобы она пересекала ось частот при ![]() . Этот участок проводится влево и вправо до достижения модулей, равных по крайней мере
. Этот участок проводится влево и вправо до достижения модулей, равных по крайней мере ![]() . Высокочастотную область можно пустить параллельно исходной ЛАХ. Низкочастотная область желаемой ЛАЧХ также должна по возможности повторять нескорректированную ЛАЧХ.
. Высокочастотную область можно пустить параллельно исходной ЛАХ. Низкочастотная область желаемой ЛАЧХ также должна по возможности повторять нескорректированную ЛАЧХ.
Построенная асимптотическая ЛАЧХ находится в приложении к пояснительной записке.
После построения желаемой ЛАЧХ и ЛФЧХ можно строить ЛАЧХ и ЛФЧХ коррекции, исходя из следующих соотношений:
![]() ;
;
![]() ;
;
![]() ;
;