Курсовая работа: Системы автоматического управления
Коэффициент демпфирования второго звена
![]()
![]()
Характеристическое уравнение:
![]()
По средствам пакета Mathсad найдем корни характеристического уравнения:
![]() , т.е.
, т.е. ![]()
Где 
![]()
Желаемая передаточная функция разомкнутой системы, настроенной на симметричный оптимум, имеет вид:
где ![]() наименьшая постоянная времени нескорректированной системы.
наименьшая постоянная времени нескорректированной системы.
![]()
Обозначив как ![]() передаточную функцию корректирующего устройства (регулятора), можно отыскать:
передаточную функцию корректирующего устройства (регулятора), можно отыскать:
 .
.
![]()


Рис. 9. Структурная схема скорректированной разомкнутой САУ
Параметры корректирующих звеньев:
1. Пропорциональное звено К=199.5
2. Интегрирующие звенья
![]() , Т1 =0.04 с
, Т1 =0.04 с
![]() , Т2 =1.852 с
, Т2 =1.852 с
![]() , Т3 =0.067 с
, Т3 =0.067 с
3. Дифференцирующее звено
![]() , Т=0.023 с
, Т=0.023 с
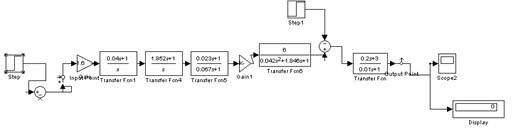
Рис.10. Модель скорректированной САУ в Matlab