Курсовая работа: Системы автоматического управления
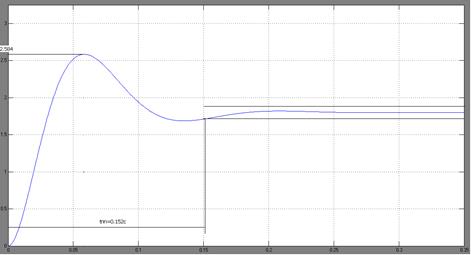
Рис.11. Переходная характеристика скорректированной САУ при минимальном задающем и отсутствии возмущающего воздействия (g=1.8 z=0)
перерегулирование:
![]()
время переходного процесса: ![]()
б) максимальное значение управляющего (g=8) и отсутствие возмущающего (z=0) воздействий: g =8
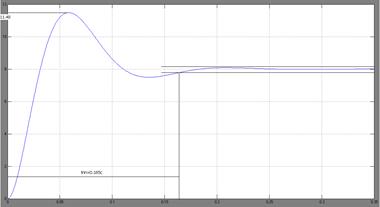
Рис.12. Переходная характеристика скорректированной САУ при максимальнм задающим и отсутствии возмущающего воздействия (g=8 z=0)
перерегулирование:
![]()
время переходного процесса: ![]()
в) минимальное значение управляющего (g=1.8) и максимальное возмущающее (z=9) воздействий g=8
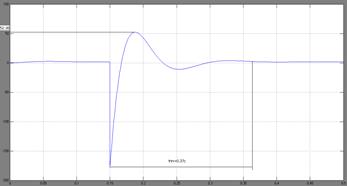
Рис.13. Переходная характеристика скорректированной САУ при минимальном задающим и максимальным возмущающим воздействии (g=1.8 z=-9)
перерегулирование:![]()
время переходного процесса: ![]()
г) максимальное значение управляющего (g=8) и максимальное возмущающее (z=9) воздействий g=8
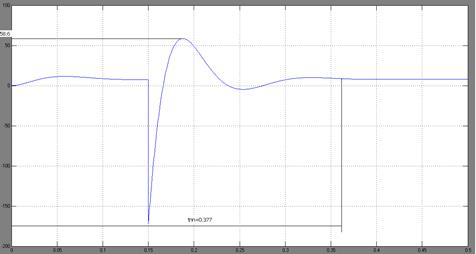
Рис.14. Переходная характеристика скорректированной САУ при максимальном задающим и максимальным возмущающим воздействии (g=8 z=-9)
перерегулирование:
![]()
время переходного процесса: ![]()
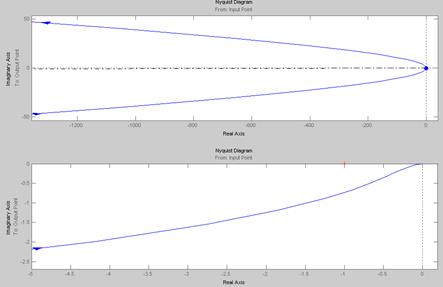
Рис.15. АФЧХ разомкнутой скорректированной САУ
Как видно из рисунка характеристика не охватывает точку [-1:0]. Из этого следует что разомкнутая, а следовательно соответственно, замкнутая САУ устойчива (по Найквисту).
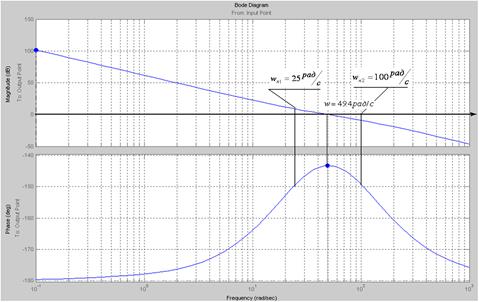
Рис.16. ЛАЧХ и ЛФЧХ разомкнутой скорректированной САУ
Запас устойчивости по амплитуде определяется величиной допустимого подъема ЛАЧХ, при котором система окажется на грани устойчивости. Из рисунка видно что запас по амплитуде бесконечен т.к. ЛФЧХ не достигает критической фазы ![]() .
. ![]()
Запас устойчивости по фазе определяется величиной избытка фазы, на который должен вырасти запаздывание САУ при частоте среза, чтобы САУ оказалась на границе устойчивости: