Курсовая работа: Устройство контроля позиционирования исполнительного механизма
Блок передачи информации реализован на микросхеме МАХ232. Устройство управления организовано на микроконтроллере семейства ClassicAT90S2313-10. Данный микроконтроллер имеет память программ 2 Кбайт, ОЗУ 128 байт и EEPROM-память данных 128 байт. Максимальное количество контактов ввода/вывода 15.
Т.к. для подключения датчиков необходимо 2 контакта, для подключения шагового двигателя - 4 контакта и семейство AVR имеет последовательный аппаратный интерфейс, то ресурсов этого микроконтроллера достаточно для реализации проекта.
2. Проектирование принципиальной схемы устройства
2.1 Схема включения микропроцессора

Рисунок 2,1 - Схема включения микропроцессора
2.2 Формирование тактовых импульсов
Формирование тактовых импульсов производится при помощи внешнего кварцевого резонатора. Такой вариант включения необходим для обеспечения высокой точности и стабильности рабочей частоты.
Схема включения показана на рис. 2.2.
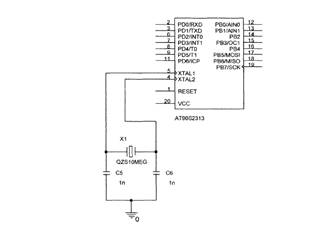
Рисунок 2.2 - Подключение кварцевого резонатора.
2.3 Схема сброса

Рисунок 2.3 - Схема сброса
Для осуществления сброса микроконтроллера при включении питания, а также по кнопке используется схема, представленная на рис 2.3.
2.4 Схема стабилизатора напряжения
Для стабилизации напряжения питания схемы используется интегральный стабилизатор LM 7805.
Входное напряжение В. Min - 7.5;
Мах- 35; Максимальный выходной ток, А - 0.5;
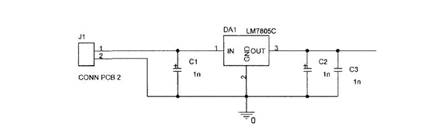
Рисунок 2.4 - Схема стабилизатора напряжения
2.5 Схема входных и выходных устройств
Входными устройствами являются:
• два датчика на фототранзисторах;
• один сигнальный провод внешнего устройства управления. Выходные устройства:
• шаговый двигатель;
• RS-232.
Датчики, сигнальный провод и шаговый двигатель подключены на плату с помощью разъёмов.
Интерфейс RS-232 реализован на микросхеме МАХ 232. Они содержат в себе преобразователь уровня, что позволяет обойтись без дополнительного преобразователя напряжения