Курсовая работа: Устройство контроля позиционирования исполнительного механизма
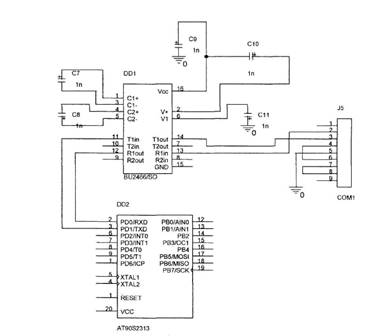
Рисунок 2.5 - Схема включения последовательного интерфейса
3. Проектирование программного обеспечения микропроцессора
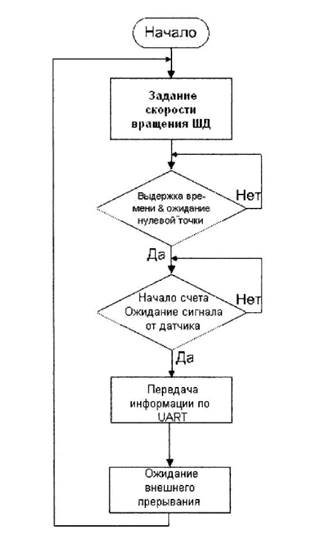
Программа должна выполнять следующие функции:
• получение и обработка информации от датчиков;
• управление шаговым двигателем;
• передачу по последовательному интерфейсу (UART); Выполнение этих операций происходит по следующему алгоритму:
Проектирование процедуры обработки прерываний
В программе используются прерывания от таймеров счетчиков. Используются оба аппаратных таймера счетчика, но на Т/СО организованы также два программных счётчика,
Проектирование процедуры передачи данных по последовательному интерфейсу
По специфике работы устройства, данные только передаются в последовательный порт компьютера, то алгоритм функционирования последовательного интерфейса значительно упрощается.
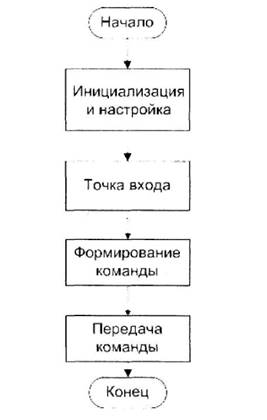
Проектирование процедуры Main
Проектирование процедуры заключается в том, чтобы в правильном порядке выполнялись процедуры, описанные за ее пределами, в правильном взаимодействий всех переменных, массивов, а также подпрограмм прерываний от таймера-счетчика и функционирования последовательного интерфейса.
4. Листингпрограммы
tfdefine ENABLE_BIT_DEFINITIONS tfinclude <ina90.h> ^include <iom!6.h> ^include "ctype.h" include "stdlib.h"
unsigned char SM[4]={9,12,6,3};
unsigned char d,S;
unsigned char TmrO_Opros[51={10,15,20,25,30f;
unsigned char Tmr(tSM{5]=}24,29,36,48,72|;
unsigned char Perepl,Perep2;
#define ENABLE_BIT_DEnNITIONS
#pragma vector=TIMERO_OVF_vect _interrupt void TlMERO_OVF_interrupt(void)
{
TCNTO=236; Perepl++; Fetep2++;
if(Perepl=TmrO_Opros[S]} (
Perepl=0; TmrO_Opros_Flag=l;
} if{Perep2=TmrO_SM[S]}