Лабораторная работа: Кривошипно-ползунный механизм, его структура, схема, анализ
3-0 – поступательная пара пятого класса;
тогда n=2; p5 =3, a p4 =0.
Подставив выявленные значения коэффициентов в выражение (1),
получим:
![]()
Следовательно, группа звеньев 4-5 является структурной группой Ассура 2 класса 2 порядка 2 вида.
Вторая группа звеньев 0-1 (рисунок 3).

Рисунок 3 – Первичный механизм
Данная группа звеньев состоит из подвижного звена – кривошипа 1, стойки 0 и одной кинематической пары:
0 – 1 – вращательная пара пятого класса;
тогда n=1; p5 =1, a p4 =0.
Подставив найденные значения в выражение (1), получим:
![]()
Следовательно, группа звеньев 1 – 2 действительно является первичным механизмом с подвижностью 1.
Структурная формула механизма
МЕХАНИЗМ=ПМ(W=1) + СГА(2 класс, 2 порядок, 2 вид)
2. Синтез кинематической схемы
Для синтеза кинематической схемы сперва необходимо установить масштабный коэффициент длин μℓ . Для нахождения μℓ необходимо взять натуральный размер кривошипа OС и разделить его на размер отрезка произвольной длины │OС│:
![]()
После этого, с помощью масштабного коэффициента длин, переводим все натуральные размеры звеньев в отрезки, с помощью которых мы будем строить кинематическую схему:
После вычисления размеров приступаем к построению одного положения механизма (рисунок 4) с помощью метода засечек.
Для этого сперва вычерчиваем стойку 0 на которой закреплен кривошип. Затем проводим через центр окружности, которая была начерчена для построения стойки, горизонтальную прямую ХХ. Она необходима для последующего нахождения центра ползуна 3. Далее из центра этой же окружности проводим две другие радиусом ![]() и
и ![]() . Затем от туда же строим чертим отрезок длиной
. Затем от туда же строим чертим отрезок длиной ![]() под углом
под углом ![]() к горизонтальной прямой ХХ. Точки пересечения этого отрезка с построенными окружностями будут точками А и С соответственно. Затем из точки А строим окружность радиусом
к горизонтальной прямой ХХ. Точки пересечения этого отрезка с построенными окружностями будут точками А и С соответственно. Затем из точки А строим окружность радиусом ![]() .
.
Точка пересечения этой окружности с прямой ХХ будет являться точкой В. Вычерчиваем направляющую для ползуна, которая будет совпадать с прямой ХХ. Строим ползун и все остальные необходимы детали чертежа. Обозначаем все точки. Синтез кинематической схемы завершен.
3. Кинематический анализ плоского механизма
Приступаем к построению плана скоростей для положения механизма. Для упрощения расчетов следует рассчитать скорости и направления для всех точек положения механизма, а затем строить план скоростей.
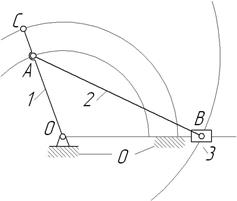
Рисунок 4 – Одно из положений механизма
Проанализируем схему кривошипно-ползунного механизма: точка О и О1 являются неподвижными точками, следовательно, модули скоростей этих точек равны нулю (![]() ).
).
Вектор скорости точки А представляет собой геометрическую сумму вектора скорости точки О и скорости относительного вращательного движения точки А вокруг точки О: