Лабораторная работа: Кривошипно-ползунный механизм, его структура, схема, анализ
Кинематический анализ успешно проведен.

Рисунок 6 – План ускорении
4. Определение сил, действующих на звенья механизма
На каждое звено плоского рычажного механизма действует сила тяжести, которая находится по формуле:
![]() (23)
(23)
где g=9,81 м/с2 - ускорение свободного падения, а ![]() - масса i-го звена.
- масса i-го звена.
Для определения массы каждого звена плоского рычажного механизма воспользуемся следующими формулами:
 (24)
(24)
Далее определяем силы тяжести для каждого звена плоского рычажного механизма:
![]() (25)
(25)
Также мы можем определить силы инерции, действующие на звенья плоского рычажного механизма, по формуле:
![]() (26)
(26)
где ![]() - масса i-го звена, а
- масса i-го звена, а ![]() - ускорение центра масс i-го звена.
- ускорение центра масс i-го звена.
Уславливаемся, что центр масс кривошипа лежит на оси его вращения, т.к в большинстве случаев кривошип – вал механизма, т.е ![]()
Также уславливаемся, что у линейных звеньев центр масс лежит на середине звена. Значения ускорений центра масс найдены в кинематическом анализе плоского рычажного механизма. Находим силы инерции:
 (27)
(27)
Определяем моменты от сил инерции:
![]() (28)
(28)
где ![]() - момент инерции i-го звена, угловое ускорение i-го звена.
- момент инерции i-го звена, угловое ускорение i-го звена.
Момент инерции i-го звена:
![]() (29)
(29)
где ![]() - масса i-го звена,
- масса i-го звена, ![]() - длина i-го звена.
- длина i-го звена.
Находим моменты от сил инерции:
![]()
Момент от сил инерции направлен противоположно направлению действию углового ускорения. Для определения углового ускорения звена необходимо на плане ускорений взять вектор тангенциальной составляющей ускорения звена и мысленно перенести его в ведомую точку звена (точка, стоящая первой в индексе), а ведущую условно остановить. Направление вращения звена при этом будет характеризовать направление углового ускорения звена.
Нанесем на построенное положение механизма все заданные внешние нагрузки. В результате, полученная картина будет являться расчетной схемой данного положения плоского рычажного механизма.
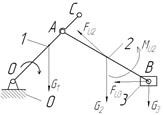
Рисунок 7 – Расчетная схема силового анализа
5. Кинетостатический метод силового анализа
В данном курсовом проекте силовой анализ мы проведем с помощью кинетостатического метода, в основе которого лежит принцип Д’Аламбера. Если к внешним силам, действующим на звенья механизма добавить силы инерции, то данный механизм будет находиться в квазистатическом состоянии. Силовой анализ этого механизма можно выполнить, используя уравнения кинетостатического равновесия: