Лабораторная работа: Кривошипно-ползунный механизм, его структура, схема, анализ
Этот метод применяется для анализа движущихся механизмов при известных массах и моментах инерции звеньев.
Для этого разбиваем механизм на структурные группы Ассура и начинаем вычерчивать с последней группы звеньев (группы, связанной с выходным звеном).
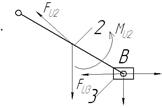
Рисунок 6 – Структурная группа Ассура 1
Разорванную связь 1-2 заменяем реакцией R12 , раскладывая ее на составляющие ![]() и
и ![]() , а нормаль XX реакцией R03 . Составляем уравнение равновесия:
, а нормаль XX реакцией R03 . Составляем уравнение равновесия:
 (31)
(31)
![]() (32)
(32)
Уравнение равновесия (32) содержит три неизвестных ![]() ,
, ![]() и
и ![]() , следовательно, его статическая неопределимость равна двум.
, следовательно, его статическая неопределимость равна двум.
С целью раскрытия статической неопределимости найдем модуль![]() .
.
Звено АВ: ![]()
![]() (33)
(33)

В результате проведенных вычислений уравнение (32) содержит две неизвестных ![]() и
и ![]() , следовательно статическая неопределимость раскрыта полностью. Уравнение равновесия примет следующий вид:
, следовательно статическая неопределимость раскрыта полностью. Уравнение равновесия примет следующий вид:
![]() (34)
(34)
Определение оставшихся неизвестных выполним с помощью плана сил. Для этого необходимо выбрать масштабный коэффициент плана сил:
 (35)
(35)
Переведем в масштабный коэффициент ![]() оставшиеся силы:
оставшиеся силы:
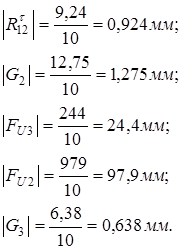 (36)
(36)
По полученным величинам строим план сил в масштабном коэффициенте ![]() (рисунок 7).
(рисунок 7).
По построенному плану сил определяем неизвестные ![]() ,
,![]() и
и ![]() :
:
 (37)
(37)
Рассмотрим первичный механизм.
Направляем уравновешивающую силу перпендикулярно оси кривошипа, в противоположную сторону вращения оси кривошипа. Вектор выходит из подвижной точки кривошипа.
Составляем уравнение равновесия:
![]() (38)
(38)
Составляем уравнение моментов сил относительно точки O:
![]() (39)
(39)
Из уравнения (4.23) определяем ![]() :
: