Реферат: Проектирование траектории перемещения роботов
Пример 4.7.1
Найдите коэффициенты для двух кубических законов изменения углов в сочленениях, приняв равными продолжительности прохождения по обоим участкам траектории. Решение. Заметим, что в этом случае для первого и второго участков траектории движения
![]() 1 (t)= a10 + a11 t + a12 t2 + a13 t3 , (4.7.17)
1 (t)= a10 + a11 t + a12 t2 + a13 t3 , (4.7.17)
![]() 2 (t)= a20 + a21 t + a22 t2 + a23 t3 . (4.7.18)
2 (t)= a20 + a21 t + a22 t2 + a23 t3 . (4.7.18)
Ограничения имеют вид
![]() 1 (0) =
1 (0) = ![]() 10 ,
10 , ![]() 2 (0)=
2 (0)=![]() 1 (tf 1 ); (4.7.19)
1 (tf 1 ); (4.7.19) ![]() 1 (t)=
1 (t)=![]() 10 ,
10 , ![]() 2 (0)=
2 (0)=![]() 1 (tf 1 ); (4.7.20)
1 (tf 1 ); (4.7.20)
![]() 2 (tf 2 )=
2 (tf 2 )=![]() 2 f ,
2 f , ![]() 2 (tf 2 )=
2 (tf 2 )=![]() 2 f ; (4.7.21)
2 f ; (4.7.21)
![]() 1 (0) =
1 (0) = ![]() 10 ,
10 , ![]() 2 (0)=
2 (0)= ![]() 1 (tf 1 ); (4.7.22)
1 (tf 1 ); (4.7.22)
Из приведенных восьми формул могут быть найдены восемь коэффициентов a10 , a11 , a12 , a13 , a20 , a21 , a22 , и a23 (см.домашнее задание 6)

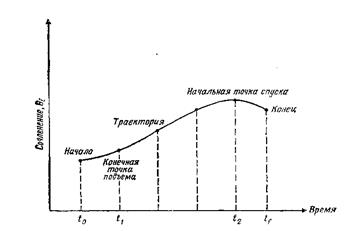
Рис. 4.7.5. Сложное движение манипулятора.
ОБЩИЕ АСПЕКТЫ ПЛАНИРОВАНИЯ ТРАЕКТОРИЙ
Вообще говоря, при планировании траектории робота нужно учитывать следующие обстоятельства.
1. Когда схват поднимает предмет, его движение должно быть направлено от опорной поверхности, чтобы избежать столкновения с ней.
2. Конечная точка подъема предмета должна лежать на нормали к поверхности, а начало системы координат схвата должно пройти через эту точку. Таким образом, будет обеспечено допустимое движение схвата. Контроль за скоростью, с которой должен подниматься предмет, может осуществляться путем слежения за временем, требуемым для перехода в эту точку.
3. Расстояние от конечной точки подъема до опорной поверхности рекомендуется выбирать равным не меньше 25 % длины последнего звена робота (0.25d6 + длина инструмента) (рис. 4.8.1).
4. Требования 1 - 3 относятся и к начальной точке спуска, т. е. схват должен перемещаться в направлении, перпендикулярном поверхности, и замедляться при подходе к опорной поверхности.
5. Из приведенных выше соображений следует, что на каждой траектории робота имеются четыре типа точек - начальная точка, конечная точка подъема, начальная точка спуска, конечная точка (рис. 4.8.2).
Таким образом, на процесс планирования траектории можно наложить следующие ограничения.
1. Начальное положение фиксировано.
2. Начальная скорость обычно равна нулю.
3. Начальное ускорение обычно равно нулю.
4. Конечное положение фиксировано.
5. Конечная скорость обычно равна нулю.
6. Конечное ускорение обычно равно нулю.
7. Конечная точка подъема должна находиться от опорной поверхности на расстоянии 0.25 d6 + длина инструмента.
8. Начальная точка спуска должна находиться от опорной поверхности на расстоянии 0.25 d6 + длина инструмента.
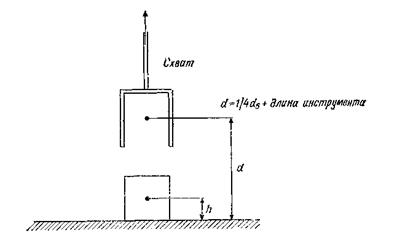
Рис. 4.8.1. Рекомендуемая конечная точка подъема.