Учебное пособие: Замкнутые системы управления
Тэ , Тм - электромагнитная и электромеханическая постоянная времени двигателя;
![]() ;
;
Rэ и Lэ - эквивалентные сопротивления и индуктивность якорной цепи;
1/Кд =C- внутренняя отрицательная обратная связь по ЭДС двигателя,
C- постоянная двигателя при Ф=const. C=кф;
Тэ =Lэ /Rэ ;
J-момент инерции двигателя с рабочей машиной.
Статический регулятор скорости
Регулятор пропорционального типа с коэффициентом передачи Кр .
Определение статических характеристик:
w=f(U3 ); w=f(Icт ), т.е. зависимости скорости от задающего и возмущающего воздействия.
Преобразуем структурную схему: вынесем возмущение Iст из замкнутого контура, затем преобразуем замкнутый контур двигателя в динамическое звено без обратной связи (Рис. 10-4.).

Положив в полученной схеме р=0,что соответствует установившемуся режиму получим ![]() :
:

где К=Кр ×Кп ×Кс ×Кд - коэффициент усиления разомкнутой системы;
В разомкнутой системе :
wор = Кр ×Кп ×Кд U3 -скорость идеального холостого хода;
Dwр = Кд ×Rэ ×Iс -падение скорости;
следовательно: w03 = wор /(1+К); Dw3с = Dwр /(1+К).
На рис. представлены статические характеристики
а) ![]() при IС =0;
при IС =0;
в) ![]() при
при![]() .
.

Т.к. в прямой цепи замкнутого контура системы нет идеального интегрирующего звена, рассматриваемая система является статической как по возмущающему (Iс ), так и по управляющему (U3 ) воздействиям и имеет статические ошибки по этим воздействиям.
Определим статическую ошибку по возмущающему воздействию Iс . ![]() т.е. выражение для DwI совпадает с величиной падения скорости в замкнутой системе.
т.е. выражение для DwI совпадает с величиной падения скорости в замкнутой системе.
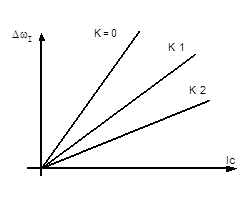
Рисунок 10-6- статическая характеристика DwI = f(Ic).
Характеристика построена для w03 =const для различных коэффициентов усиления К2>К1>0.