Учебное пособие: Замкнутые системы управления
Статическая ошибка по управляющему воздействию U3

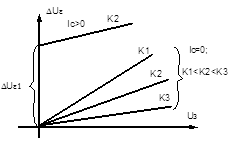
Ueо - статическая ошибка по управляющему воздействию замкнутой системы при Iс = 0,
DUe I - приращение статической ошибки, обусловленное Iс .
DUe увеличивается с возрастанием нагрузки Iс Рис. 10-7.
При К=¥DUe =0.
Динамические характеристики:
для оценки влияния отрицательной обратной связи по скорости, типа и параметров регулятора на свойства регулятора скорости сравним передаточные функции (п.ф.) разомкнутых и замкнутых систем регулирования W.
Примем Тс и Тп равными 0 ввиду их малости по сравнению с Тэ и Тм . Передаточная функция системы по управляющему воздействию:
 .
.
Линейная стационарная система второго порядка всегда устойчива. Предельный коэффициент усиления Кпр = ¥. Качество переходного процесса полностью определяется относительным коэффициентом демпфирования x и собственной частотой колебания Wо (при x = 0).
Собственная частота Wо характеризует быстродействие системы; чем больше Wо , тем быстрее затухает переходной процесс.
Для разомкнутой системы :
![]()
![]()
При x<1- переходной процесс колебательный затухающий.
При x>1- переходной процесс апериодический.
При x=0- незатухающие гармонические колебания.
x-коэффициент демпфирования.
Передаточная функция замкнутой системы по управляющему воздействию

Для замкнутой системы:
![]()
![]()
То есть, жесткая отрицательная обратная связь по скорости увеличивает Wо и уменьшает x3 в ![]() раз. Значит с ростом К возрастает скорость затухания и уменьшается колебательность (перерегулирование) переходного процесса. Жесткая отрицательная обратная связь по w улучшает устойчивость, т.к. уменьшается Тм и Тэ Тм в (1+К) раз. Аналогично исследуются переходные процессы, обусловленные действием нагрузки в виде ударного приложения Мс (или Iс = Кд Мс ) к валу двигателя.
раз. Значит с ростом К возрастает скорость затухания и уменьшается колебательность (перерегулирование) переходного процесса. Жесткая отрицательная обратная связь по w улучшает устойчивость, т.к. уменьшается Тм и Тэ Тм в (1+К) раз. Аналогично исследуются переходные процессы, обусловленные действием нагрузки в виде ударного приложения Мс (или Iс = Кд Мс ) к валу двигателя.
Переходная функция замкнутой системы по возмущающему воздействию:


где Iд , Mд - динамические ток и момент.
Если Р=0 (установившийся режим) Iд = Iс ;