Учебное пособие: Замкнутые системы управления
Мд =Мс . ![]()
На кривых переходного процесса w = f(t) и
Мд = f(t) (Рис. 10-8.) наибольшее отклонение скорости Dwдин от ее начального значения называют динамическим падением скорости, а статическую ошибку DwI - статическим падением скорости.
Отклонение ![]() характеризует перерегулирование по скорости, а отношение DМд /DМ дуст - по моменту.
характеризует перерегулирование по скорости, а отношение DМд /DМ дуст - по моменту.
АСТАТИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ
Рассмотрим характеристики САР скорости с ПИ- регулятором. Структурная схема аналогична рассмотренной ранее для статического регулятора скорости,передаточная функция регулятора:
![]()
Передаточные функции разомкнутых и замкнутых систем по управляющему воздействию.
![]()

где Кv =Кп Кд Кс /tо - коэффициент усиления разомкнутой системы по w.
Из структурной схемы и передаточной функции следует, что регулятор скорости является астатической системой с астатизмом первого порядка, как по управляющему, так и по возмущающему Iс воздействиям. Следовательно: статические ошибки DwI и DUe равны нулю, однако устойчивость системы ухудшается, т.к. интегратор вносит фазовый сдвиг в замкнутый контур- 90о на всех частотах. Это так же следует из выражения для предельного коэффициента системы.
Кvпр = 1/(Тэ - tR );
т.е. Кvпр имеет предельное значение. Оптимальное значение постоянной времени регулятора с точки зрения устойчивости tRотп = Тэ . В этом случае Кvпр = ¥.
Регулятор скорости с отрицательной обратной связь по току.
На рис представлена структурная схема САР с обратной связь по току.
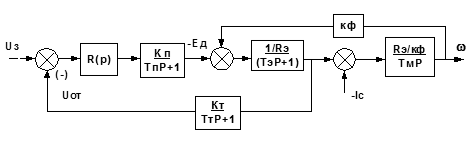
Кт /(Тт +1)- датчики тока$;
Кт - коэффициент передачи ОС по току;
Тт - постоянная времени фильтра/
Преобразуем структурную схему на рис к виду рис
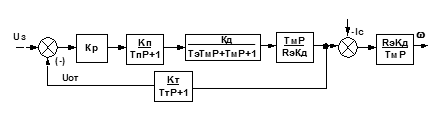
Учитывая, что в статическом режиме р=0, Iд = Iс
 ,
,
(+)- при положительной обратной связи по току.
(-)- при отрицательной обратной связи по току.
Скорость идеального холостого хода в замкнутой и разомкнутой системах одинакова.
 ,
,
где Dwр = Iс Rэ Кд - падение скорости в разомкнутой системе.