Учебное пособие: Замкнутые системы управления
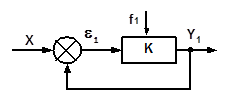
Рис. 8
f1 ¹ 0; e1 = X- Y1 ; ![]()
![]()
учитывая, что Y01 = Y1 + Y1Р , определим:
![]()
тогда:
 где
где
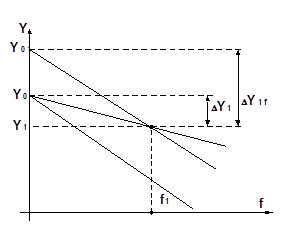
Рис. 9
DY1 - падение значения регулируемой переменной в замкнутой системе под действием возмущения f1 (Рис. 9);
DY1Р - падение регулируемой переменой в разомкнутой системе при действии f1 ;
Yo - значение регулируемой переменной при f1 =0 по характеристике замкнутой системы;
Y01 - значение регулируемой переменной при f1 =0 по характеристике разомкнутой системы, проходящей через точку (Y1 ;f1 ) характеристики.
Следовательно: величины Sx и Sf обратно пропорциональны величине К, а Sf , кроме этого, зависит от величины задания Х, т.е. максимален на нижнем диапазоне регулирования при Х=Хmin .
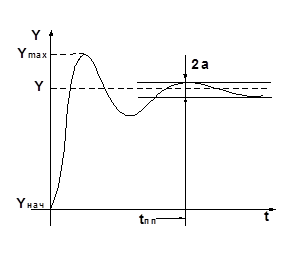
Рис. 10
Динамическая характеристика замкнутой СУЭП отражает поведение системы в переходном процессе (п/п) пуска, торможения, регулирования скорости, наброса и сброса нагрузки, т.е. при изменении задающего или возмущающего воздействия. При исследовании системы применяют воздействие в виде скачка: x(t) = X |(t) и f1 (t) = F1 |(t), где |(t)- единичная ступенчатая функция.
Прямые показатели качества :
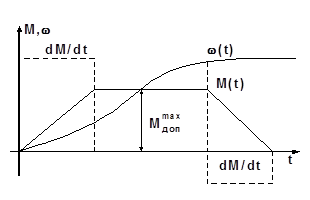
Рис 11
Быстродействие - продолжительность п/п, т.е. длительность tп/п до условно установившегося значения регулируемой переменной, когда ее отклонение не превышает a (3 ¸ 5% от установившегося значения) т.е.
(Y(t)- Y)/(Y- Yнач ) £ a.
От быстродействия зависят: динамическая ошибка в системе стабилизации при набросе нагрузки, точность в системах следящих и программного управления. Быстродействие системы ограничивается перегрузочной способностью двигателя, di/dt, допустимым ускорением механизма.
Перерегулирование ![]() - отклонение величины max превышения регулируемого параметра над установившемся значением к величине приращения ее установившейся величины. Обычно tдоп. £ 18 ¸ 30%, иногда tдоп. = 0 (привода подачи станков).
- отклонение величины max превышения регулируемого параметра над установившемся значением к величине приращения ее установившейся величины. Обычно tдоп. £ 18 ¸ 30%, иногда tдоп. = 0 (привода подачи станков).
Число колебаний регулируемой величины за время tп/п - определяет демпфирование колебаний в системе. Обычно число колебаний не более трех для избежания резонанса в ЭП.
Для систем, работающих в режиме пуска торможения, оптимальным по быстродействию будет трапецеидальный график изменения крутящего момента ЭД (при Мс = 0). Время переходного процесса будет минимально, если п/п будет происходить при :
Мmax = Мmax доп ;
dМ/dt = мах доп., соответствует eдоп. (рис. );
Мmax доп и eдоп (допустимое ускорение) определяются перегрузочной способностью двигателя, механизма передачи, технологическими характеристиками.