Учебное пособие: Замкнутые системы управления
Проектирование СУЭП с заданными показателями качества невозможно без анализа и исследования модели САУЭП. Моделью может быть реальное техническое устройство и абстрактное математическое описание, т.е. различают моделирование физическое и математическое. В основу физического моделирования положено изучение процессов на моделях одной физической природы с оригиналом. Математическое моделирование основано на тождественности дифференциальных уравнений, описывающих процессы в оригинале и функциональные зависимости между выходными величинами на модели. Математическое моделирование позволяет прогнозировать динамические характеристики реальной системы при свойственных ей внешних воздействиях, определить показатели качества системы и их соответствие заданию. Математическое моделирование реализуют на ЭВМ. Машинное моделирование наиболее широко применяется в форме структурного моделирования.
Математическая модель при структурном моделировании представляет собой систему дифференциальных уравнений, каждое из которых представляет элементы САУЭП: преобразователь, якорную цепь двигателя и его механическую часть, регуляторы, цепи обратных связей и другое. Составлять математическую модель удобно на основании структурной схемы для исследования динамики СУЭП. При составлении дифференциального уравнении, описывающего звено ЭП, учитываются его статические и динамические характеристики: коэффициент передачи звена, постоянные времени.
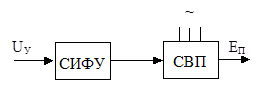
Рис. 12
Тиристорный преобразователь в динамике представляет сложное нелинейное звено, что связано с его неполной управляемостью. Частота управления ограничена
wк = mwo /2,
где
wо = 2pfс ; fс = 50 Гц; m- число фаз. (рис. 12).
СИФУ - система импульсно-фазового управления тиристорами;
СВП - собственно вентильный преобразователь.
При безинерционном СИФУ передаточная функция ТП,
Wтп =Dе(Р)/DUу(Р)=Кп е- t р - импульсное звено чистого запаздывания; где
t- среднестатическое запаздывание: t=1/Рп fc ;
Рп - число пульсаций за период;
fс - частота сети.
Импульсное звено чистого запаздывания аппроксимируется апериодическим звеном:
![]()
где ![]()
Если на входе СИФУ находится фильтр (апериодическое звено) для уменьшения помех с постоянной времени Тф , передаточная функция ТП примет вид: ![]()
Дифференциальное уравнение, описывающее зависимость между Еп и Uу ТП:
![]()
Кп - статический коэффициент передачи ТП. В зависимости от вида опорного напряжения СИФУ Кп может быть постоянной или переменной величиной. (рис. 13).
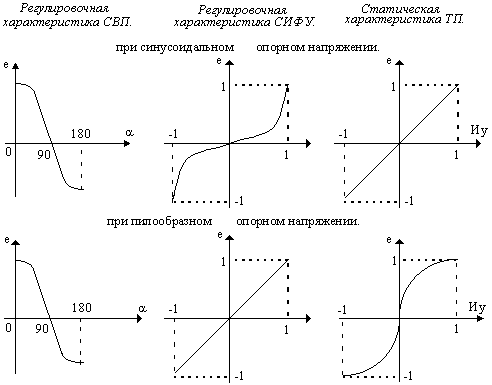
Рис. 13
При синусоидальном опорном напряжении статическая характеристика ТП линейная, т.е. Кп = const. При пилообразном опорном напряжении статическая характеристика нелинейна. Такой ТП моделировать сложнее. Внутренне сопротивление и индуктивность силовой цепи ТП учитываются в эквивалентных параметрах якорной цепи двигателя, питаемого от ТП.
В оптимизированных замкнутых системах Тп принимают за некомпенсированную постоянную времени Тm =Тп =(3¸20) мс.
Генератор постоянного тока
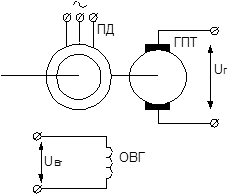
ПД-приводной двигатель;