Дипломная работа: Система сканирования и стабилизации изображения
Чтобы перейти из положения 1 в положение 2 с наведением на цель, необходимы следующим образом поворачивать двигатель: сначала по часовой стрелке на угол α1, затем против часовой стрелки на угол (α2 + φ). То есть повернуть против часовой стрелки на угол (φ + (α2 – α1)) = (φ + Δ α), где Δ α = α2 – α1.
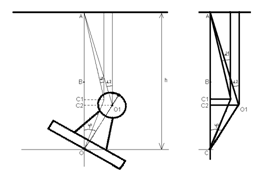
Рис 4.1.3 Нахождение угла поворота ротора на произвольном шаге
Мы знаем, как рассчитать угол поворота двигателя. Нам нужно, чтобы прогнозировался угол поворота платформы через Δt.
Так как Δtу нас мало – порядка десятков миллисекунд, то можно вначале считать угловую скорость ω1 с измерителя угловой скорости, установленного на платформе. А затем считать, что угол Δφ, на который повернётся платформа в течение Δtравным ω1Δt.
Также мы будем считывать и показания датчика угла – φ1 – угол определяющий положение платформы.
Тогда мы считаем, что через Δtположение платформы будет определяться углом φ = φ1 + Δφ. И поэтому можно найти углы α1 и α2 по формулам:
 ;
;
 .
.
И тогда нужно задать, что двигатель должен повернуться на угол α = α2 – – α1 + Δφс угловой скоростью ω = α / Δt.
Сформулируем алгоритм полностью:
1. Пусть начальное положение платформы горизонтальное и луч наведён на цель. Тогда φ = 0, α = 0, также заданы r и h;
Дальнейшие пункты повторяем при t = nΔt, где n = 0, 1, 2, …
2. Считываем угловую скорость платформы ω1;
3. Считываем положение платформы φ1;
4. Прогнозируем положение платформы через Δt: φ = φ1 + ω1Δt;
5. По формулам находим α1 и α2:
; .
6. Подаем на двигатель значения угла, на который нужно совершить поворот и угловой скорости этого поворота: α = α2 – α1 + Δφ, ω = α / Δt.
3.1.2 Алгоритм стабилизации при сканировании
В данном случае установка остаётся такой же.
Теперь необходимо, чтобы луч О1 В в момент времени t проходил через точку cкоординатой x, где x = x(t) – изменяется со временем по определённому закону в некотором интервале (слева и справа от точки А). Пусть начало координат – точка А. Это моделирует ситуацию сканирования.
Пусть вначале платформа находится в горизонтальном положении, а затем через время ∆tона повернулась на угол φ (рис. Н). Тогда луч О1 В должен проходить через точку с координатой х = х(∆t) = ∆x. Для этого нужно повернуть двигатель на угол φ против часовой стрелки до вертикального положения. А затем на угол α также против часовой стрелки.
Найдём угол α с помощью заданных величин ОА = h, ОО1 = r. А также ![]() .
.
Из треугольника ОО1 С находим: ![]() ,
,
Отсюда ![]() .
.
![]()
Теперь можно найти tgα:  ;
;
Отсюда находим  .
.
Получили, что двигатель должен совершить поворот на угол (α+φ) против часовой стрелки