Курсовая работа: Аналіз типової системи автоматичного регулювання температури в печі
 , де
, де ![]() /10.7/
/10.7/
Високочастотна ділянка ЛАЧХ визначає поведінку системи в зоні від’ємних децибелів, а тому впливає тільки на початок перехідного процесу. Щоб збільшити стійкість системи до високочастотних завад, необхідно мати якомога більший (по модулю) нахил ЛАЧХ. [1, c.331] Приймаємо нахил бажаної ЛАЧХ на цій ділянці рівним - 40 дб/дек. Рівняння високочастотної частини ЛАЧХ запишеться
![]() , де
, де ![]() /10.8/
/10.8/
За рівняннями для дійсної /10.4/ та бажаної ЛАЧХ /10.5/, /10.6/, /10.7/, /10.8/ будуємо згадані логарифмічні амплітудно-частотні характеристики в одній системі координат (рис. 15).
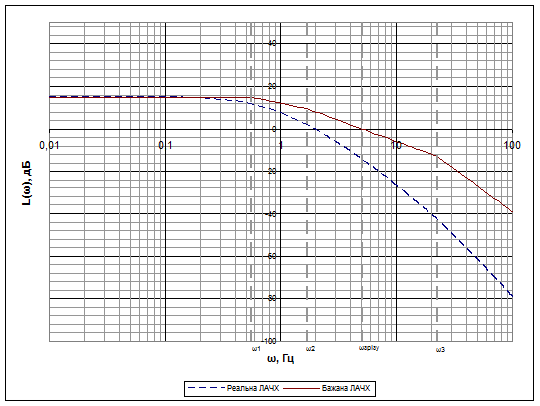
Рис. 15. Реальна та бажана логарифмічні ампілтудо-частотні характеристики.
При послідовному з'єднанні ланок зв'язок між ЛАЧХ ланок наступний:
![]() .
.
Тоді ![]() і отримаємо ЛАЧХ коректуючої ланки, представлену на рис. 16.
і отримаємо ЛАЧХ коректуючої ланки, представлену на рис. 16.
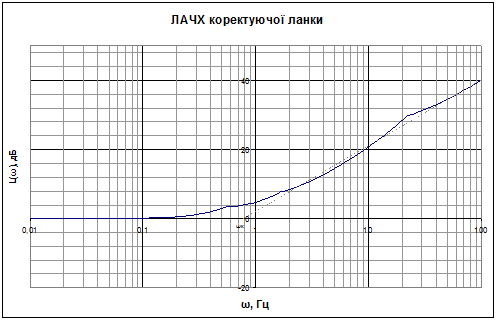
Рис.16. ЛАЧХ коректуючої ланки.
У першому наближенні таку ЛАЧХ має ланка з передаточною функцією
![]() /10.9/
/10.9/
Апроксимуючи отриману ЛАЧХ коректуючої ланки відрізками прямих, знаходимо частоту спряження ωк =0,7815 Гц; тоді стала часу
Тк = (ωк ) - 1 =1,2796 с.
Нахил ЛАЧХ коректуючої ланки близький до 20 дб/дек, тому показник степеня /10.9/ дорівнює n=1.
Отже, передаточна функція коректуючої ланки
![]() /10.10/
/10.10/
Передаточна функція розімкнутої системи із послідовною коректуючою ланкою
![]() .
.
Передаточна функція замкнутої системи із послідовною коректуючою ланкою
![]() .
.
Перехідна характеристика замкнутої системи зображена на рис.17, а годограф АФЧХ розімкнутої системи - на рис. 18.

Рис. 17. Перехідна характеристика замкненої системи з послідовною коректуючою ланкою за каналом завдання.

Рис. 18. Годограф АФЧХ розімкнутої системи з послідовною коректуючою ланкою
Отже, введення послідовної коректуючої ланки дозволило зменшити час регулювання з 3,2 с до 0,342 с, усунути перерегулювання, збільшити запас стійкості системи по фазі з 52,20 до 87,90 , проте усталена помилка залишилась на рівні δуст = 0,15.
Щоб усунути усталену помилку, ввдемо неодиничний зворотній зв’язок із коефіцієнтом передачі kзз =1-1/kр [ 1, с.313], де kр - коефіцієнт передачі розімкнутої системи.