Курсовая работа: Динамика плоских шарнирных механизмов
Плоский шарнирный механизм (рис. 1), расположенный в вертикальной плоскости, движется под действием внешнего момента![]() , приложенного к ведущему звену (кривошипу ОА) и изменяющемуся по закону
, приложенного к ведущему звену (кривошипу ОА) и изменяющемуся по закону![]() . На звено О1 D действует полезная нагрузка MH , величина которой задается соотношением
. На звено О1 D действует полезная нагрузка MH , величина которой задается соотношением
![]()
Звенья механизма моделируются сплошными однородными стержнями, массы которых пропорциональны их длине. Погонная плотность каждого стержня равна ρ. Соединение стержней осуществлено идеальными шарнирами. Движение механизма начинается из состояния покоя, а начальное значение угла поворота ведущего звена равно φ = 0.
Требуется
- Составить дифференциальное уравнение движения механизма с помощью
теоремы об изменении кинетической энергии.
- Определить динамические реакции внешних и внутренних связей.
- Провести численное интегрирование дифференциального уравнения движения при заданных начальных условиях с помощью пакета Mathcad.
- Провести анализ результатов вычислений.
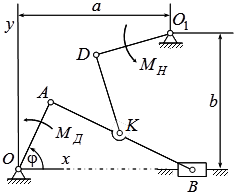
Рис. 1 Схема механизма
Дано:

2. Составление дифференциального уравнения движения механизма
Для решения поставленной задачи выберем правую систему координат, начало которой расположим в подшипнике О. Рассмотрим механизм в произвольном положении и изобразим силы, действующие на него в данный момент времени (рис.2): ![]() - силы тяжести звеньев; MH - полезная нагрузка; МД - возмущающий момент;
- силы тяжести звеньев; MH - полезная нагрузка; МД - возмущающий момент; ![]() - реакции опор.
- реакции опор.
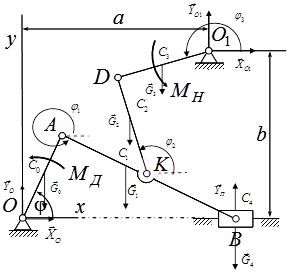
Рис.2 Расчётная схема механизма.
2.1 Составление кинематических соотношений
Рассматриваемый механизм представляет собой механическую систему с одной степенью свободы. Положение всех его звеньев будем определять с помощью угла поворота ведущего звена φ. Углы поворотов звеньев φk (k=1,2,3), отсчитываются от горизонтальной оси Ох в положительном направлении.
Выразим кинематические характеристики всех тел механизма через кинематические параметры ведущего звена с помощью уравнений геометрических связей (подробное описание этой процедуры можно получить в КР по кинематике 21 вариант за 2006 г.)
 (1)
(1)
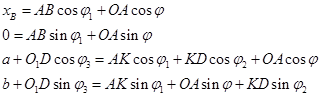
Угловые координаты звеньев механизма и координата ползуна B будут определяться соотношениями
![]()
![]() (2)
(2)
![]()
![]()
где - ![]()
![]()
![]()
![]()
Угловые скорости звеньев можно получить из соотношения