Курсовая работа: Динамика плоских шарнирных механизмов
![]() - кинетическая энергия шатуна АB, совершающего плоское движение;
- кинетическая энергия шатуна АB, совершающего плоское движение;
![]() - кинетическая энергия шатуна KD, совершающего плоское движение;
- кинетическая энергия шатуна KD, совершающего плоское движение;
![]() - кинетическая энергия кривошипа О1 D, совершающего вращательное движение вокруг оси O1 z;
- кинетическая энергия кривошипа О1 D, совершающего вращательное движение вокруг оси O1 z;
![]() - кинетическая энергия ползуна B, который движется поступательно.
- кинетическая энергия ползуна B, который движется поступательно.
Моменты инерции сплошных однородных стержней, составляющих механизм, относительно осей проходящих через их центры масс равны
![]()
![]()
![]()
![]()
Подставляя всё в выражение кинетической энергии системы, окончательно получаем:
![]() (13)
(13)
где ![]() (14)
(14)
- приведенный момент инерции механизма, а величины![]() , (k = 1,4) - скорости точек механизма, отнесенные к угловой скорости ведущего звена
, (k = 1,4) - скорости точек механизма, отнесенные к угловой скорости ведущего звена ![]()
Для рассматриваемой механической системы, состоящей из абсолютно твердых тел, соединенных идеальными шарнирами сумма мощностей внутренних сил равна нулю![]() .
.
Сумма мощностей внешних сил будет равна
![]()
где![]() ,
, ![]() ,
, ![]() ,
,![]() мощности сил тяжести звеньев;
мощности сил тяжести звеньев; ![]() - мощность момента приводящего механизм в движение;
- мощность момента приводящего механизм в движение;![]() - мощность полезной нагрузки.
- мощность полезной нагрузки.
Мощности сил![]() ,
,![]() равны нулю, т.к. реакция опорной плоскости YП и сила тяжести
равны нулю, т.к. реакция опорной плоскости YП и сила тяжести ![]() перпендикулярна скорости точки B, а остальные силы приложены к неподвижным точкам.
перпендикулярна скорости точки B, а остальные силы приложены к неподвижным точкам.
Учитывая выражения для движущего момента МД и полезной нагрузки![]() , окончательно получим
, окончательно получим
![]() (15)
(15)
где![]() (16)
(16)
- приведенный момент внешних сил, а величины ![]() и
и ![]() равны
равны
![]()
![]()
![]()
Подставляя найденные выражение кинетической энергии (13) и мощности внешних сил (15) в теорему об изменении кинетической энергии (12), получим дифференциальное уравнение движения механизма
![]() (17)
(17)
где ![]() - производная момента инерции механизма по углу поворота ведущего звена.
- производная момента инерции механизма по углу поворота ведущего звена.
Решив данное дифференциальное уравнение второго порядка с указанными в задаче начальными условиями, найдем закон движения ведущего звена![]() , его угловую скорость
, его угловую скорость ![]() и угловое ускорение
и угловое ускорение![]() .
.
3. Нахождение реакций внешних и внутренних связей
Для определения реакций внешних и внутренних связей расчленим плоский шарнирный механизм на отдельные звенья и изобразим реакции внешних и внутренних связей каждого звена (рис. 3).
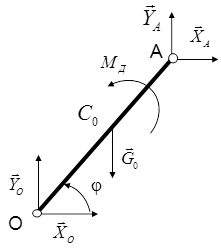
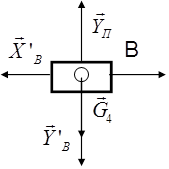
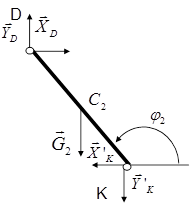
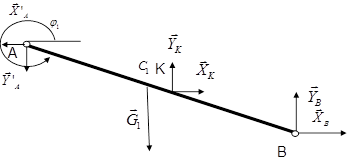
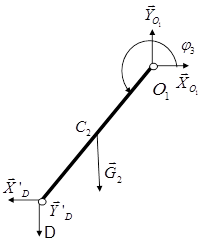
Рис.3 Расчётные схемы звеньев плоского механизма.
Применив к каждому телу, изображенному на расчетной схеме, теорему о движении центра масс (в проекциях на оси координат) и теорему об изменении кинетического момента (для кривошипов относительно осей вращения, для шатунов относительно осей проходящих через центр масс) получим следующую систему уравнений:
Кривошип ОА: