Курсовая работа: Горизонтально-ковачная машина
SК – критическое скольжение.
q=2*Sк *R1 /R’2 , (5.2)
где: R1 – сопротивление статорной цепи;
R’2 – приведенной сопротивление ротора двигателя.
Тогда по (5.2):
q = 2*0,056*0,020/0,017 = 0,132;
и по (5.1):
 .
.
Механическая характеристика двигателя приведена на рисунке 5.1.
Таблица 5.1 – Результаты расчета МХ двигателя
| S | 0 | 0,01 | 0,03 | 0,056 | 0,1 | 0,3 | 0,5 | 0,7 | 0,9 | 1,0 |
| M, Н*м | 0 | 375,3 | 875,2 | 1040,4 | 895,3 | 390,8 | 241,8 | 174,5 | 136,4 | 122,9 |
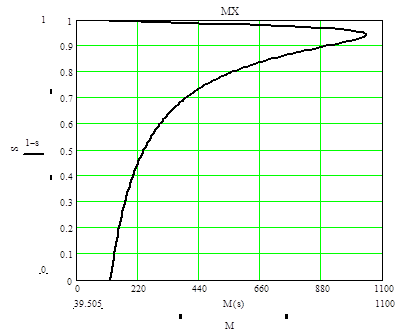
Рисунок 5.1 – Естественная механическая характеристика двигателя
Но, в нашем случае двигатель должен работать на искусственной МХ (т.к. регулируем угловую скорость с помощью преобразователя частоты вниз от номинальной). Т.к. мы регулируем при постоянном моменте (нагрузка – пульсирующая, и можно найти некоторое среднее значение; более того, чем больше маховик (момент инерции маховика), тем более у графика нагрузки будут «сглажены» пики), то искусственная характеристика двигателя будет иметь аналогичный вид (значение момента критического будет неизменным), но скорость идеального холостого хода будет иметь меньшее значение (в соответствии с требуемой скоростью вращения рабочего механизма).
Преобразователь частоты фирмы Omron: 3G3HV – B418K мощностью 185 кВт и на трёхфазное напряжение 400 В.

Рисунок 5.2 – Искусственная механическая характеристика двигателя
5.2 Расчет статических электромеханических характеристик двигателя и привода
Потребляемый двигателем номинальный ток статора по [6]:
![]() , (5.3)
, (5.3)
где: UН – номинальное напряжение двигателя;
hН – номинальный КПД двигателя;
cosjН – номинальный коэффициент мощности двигателя.
![]() А.
А.
Определяем относительный ток намагничивания по [6]:
 , (5.4)
, (5.4)
где:  . (5.5)
. (5.5)
Определяем i2 m по (5.5):
 А.
А.
Тогда определим iм по (5.4):