Курсовая работа: Горизонтально-ковачная машина
SK = 5,6%.
Номинальный момент двигателя по [3]:
![]() , (4.6)
, (4.6)
где: Рн – номинальная мощность двигателя, Вт;
wн – номинальная угловая скорость двигателя, рад/с.
Скорость холостого хода:
w0 = p*n0 /30 = 3,14159*3000/30 = 314,159 рад/с. (4.7)
Тогда по (4.7):
wн = w0 *(1 – Sн) = 314,159*(1 – 0,021) = 307,562 рад/с. (4.8)
Тогда по (4.6):
МН = 160000/307,562 = 520,221 Н*м < 895,559 Н*м.
Однако даже этот двигатель (самый мощный асинхронный двигатель с повышенным скольжением) не обеспечит требуемый момент. Тогда поставим не один, а два одинаковых двигателя (смотри расчёты далее). Причём, оба двигателя приводят во вращательное движение один вал, на котором находится шкив ременной передачи, через дифференциал (конический редуктор, у которого две шестерни и одно колесо). Схема дифференциала с двумя двигателями приведена на рисунке 4.1.
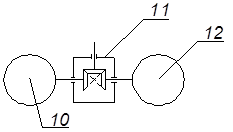
10 – Первый АД с КЗ с повышенным скольжением;
11 – Дифференциал;
10 – Второй АД с КЗ с повышенным скольжением.
Рисунок 4.1 – Схема дифференциала с двумя двигателями
Таким образом, мы ставим два одинаковых двигателя АОС3 315 2У и соединяем их со шкивом через механический дифференциал (конический редуктор), причём в нашем случае принимаем передаточное отношение i = 1. В этом случае:
![]() М∑ = М1 + М2 ;
М∑ = М1 + М2 ;
(4.9)
щ∑ = (щ1 ± щ2 )/2,
где: М1 – момент, развиваемый первым двигателем;
М2 – момент, развиваемый вторым двигателем;
щ1 – угловая скорость вращения первого двигателя;
щ2 – угловая скорость вращения второго двигателя;
щ∑ – угловая скорость вращения колеса редуктора.
Причём во втором выражении системы (4.9) знак «+» ставится в том случае, если двигатели вращаются в разных направлениях (в нашем случае необходимо сделать именно так), а знак «–» – если двигатели вращаются в одном направлении.
Кроме того, применение двух двигательного электропривода приведёт к уменьшению момента инерции привода в среднем на 5 – 8%, что, в свою очередь, приведёт к уменьшению потерь в переходных процессах (в нашем случае при пуске).
Таким образом, момент номинальный: