Курсовая работа: Горизонтально-ковачная машина
Определяем i2 по [6]:
 . (5.6)
. (5.6)
Тогда по (5.6):

Формула для расчета электромеханической характеристики I1 = f(S) – зависимость тока статора от скольжения по [6]:
 . (5.7)
. (5.7)
Тогда по (5.7):

 .
.
Таблица 5.2 – Результаты расчета электромеханической характеристики двигателя
| S | -1 | – 0,4 | – 0,1 | – 0,05 | 0 | 0,056 | 0,1 | 0,2 | 1,0 |
| I1 , A | 976,5 | 973,1 | 872,0 | 669,0 | 45,5 | 671,7 | 831,4 | 960,0 | 970,5 |
Электромеханическая характеристика двигателя приведена на рис. 5.3.
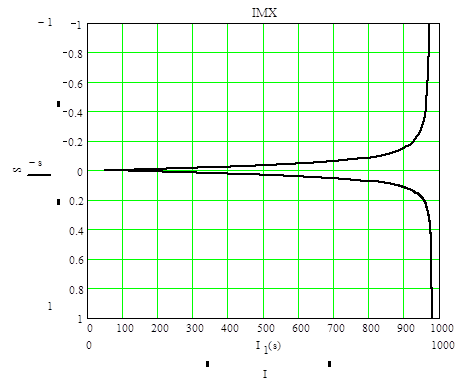
Рисунок 5.3 – Электромеханическая характеристика двигателя
6. Расчет переходных процессов в электроприводе за цикл работы
В диапазоне изменения скольжения S от 0 до Sк механическая характеристика может быть лимитирована, поэтому переходные процессы можно описать системой дифференциальных уравнений из [7]:
![]()
![]()
 (6.1)
(6.1)
где: М, Мс – момент двигателя и нагрузки;
Тэ – электромагнитная постоянная времени;
b – жесткость МХ привода;
J – момент инерции привода.
Электромагнитная постоянная времени:
 . (6.2)
. (6.2)
Тогда по (6.2):
![]() с.
с.
Механическая постоянная времени привода по [7]:
ТМ = JПР /b. (6.3)
где: b – жесткость МХ привода, рассчитанная в пункте (4.1).
Тогда по (6.3):
ТМ = 136,874/315,412 = 0,434 с.