Курсовая работа: Кинематический анализ механизма насоса
где: n – количество звеньев; p5 – количество низших пар; p4 - количество высших пар.
N = 4; p5 = 4; p4 = 0
W = 3·(4 - 1) - 2·4- 0 = 1
Степень подвижности механизма W = 1
Механизм состоит из 4 звеньев:
1 -кривошип О А;
2 -шатун АВ;
3 - ползун В;
4-стойка.
Звенья 1-3 -подвижные, 4- неподвижное звено.
На рис.1 изображена структурная схема механизма с разбиением на группы Ассура и начальный механизм.
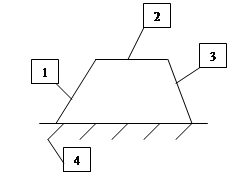
Рис.1. Структурная схема механизма.
Структурная схема наглядно показывает, что механизм состоит из начального механизма 1 класса (стойка 4 и кривошип 1) и одной группы Ассура (шатун 2 и ползун 3).
Структурная формула механизма: I (4-1) → II(2-3)
Механизм относится к механизмам II класса по классификации И.И. Артоболевского.
1.2 Кинематический анализ графоаналитическим методом (методом планов)
1.2.1 Построение плана положений механизма
На листе формата А. 1 изображаем в масштабе μs =0,0025 м/ммплан положений механизма. План строим в такой последовательности. Выбираем произвольно точку О и из нее описываем окружность радиуса ОА. Вертикально вниз от точки О откладываем величину е и проводим горизонтальную линию. Это будет линия движения ползуна В. Найдем начальное положение точки В (Во):
ОВ0 =АВ-АО=520-90=430 мм
ЕВ0 =![]()
![]()
Соединим точку В0 с точкой О и продлим до пересечения с окружностью, получаем точку Ао . От точки Ао в направлении вращения кривошипа ОА разбиваем окружность на 12 равных частей, через каждые 30 градусов, проставляя при этом последовательно точки Ао, А1 А2 и т.д. Соединив полученные точки с центром окружности О, получим 12 положений кривошипа ОА. Точка В принадлежит шатуну АВ и ползуну В и движется поступательно по направляющей, поэтому для построения плана положений звена АВ из каждой точки А раствором циркуля, равным длине шатуна АВ в принятом масштабе, делаем засечки на направляющей, получая точки Во, В1 В2 и т.д., которые последовательно соединяем с точками Ао, A1 и проч.
1.2.2 Построение планов скоростей
Планы скоростей строятся по векторным уравнениям, которые составляются отдельно для каждой группы Ассура в порядке присоединения их к ведущему звену. Для ведущего звена ОА определяем величину скорости точки А:
VA = ω1 ·LОА
VA = 14 ∙ 0,09= 1,26 м/с
μV =VA /[PA ]= 1,26/45=0,028м/с/мм
Вектор VA перпендикулярен радиусу, т.е. отрезку ОА, и направлен в сторону, определяемую направлением ω1.
Из произвольной точки Р, называемой полюсом плана скоростей, откладываем в указанном направлении отрезок [ра] длиной 45 мм.