Курсовая работа: Математическая модель в пространстве состояний линейного стационарного объекта управления
и является квадратичной функцией от начальных значений отклонения вектора состояния.
Таким образом, получаем, что при ![]() оптимальное управление приобретает форму стационарной обратной связи по состоянию
оптимальное управление приобретает форму стационарной обратной связи по состоянию
![]()
где ![]() — решение алгебраического матричного уравнения Риккати.
— решение алгебраического матричного уравнения Риккати.
5.1.1. Решение алгебраического уравнения Риккати методом диагонализации
Для решения данной задачи найдем весовые матрицы ![]() и
и ![]() :
:
Выберем произвольно ![]() , тогда
, тогда

Взяв значения ![]() из решения задачи L – проблемы моментов получим:
из решения задачи L – проблемы моментов получим:


Матрицы системы имеют вид:

 ,
, ![]() .
.
Введем расширенный вектор состояния  .
.
Тогда матрица Z будет иметь следующий вид:  ,
,
или в численном виде
 .
.
Собственные значения матрицы ![]() :
:  .
.
Зная собственные значения и собственные вектора матрицы Z , построим матрицу ![]()

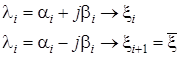
По определению все решения должны быть устойчивы при любых начальных условиях ![]() , т.е. при
, т.е. при ![]() . Чтобы не оперировать комплексными числами, осуществим следующий переход. Пусть:
. Чтобы не оперировать комплексными числами, осуществим следующий переход. Пусть:
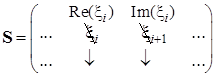
Тогда матрица ![]() формируется следующим образом:
формируется следующим образом:
 .
.
Можно показать, что матрицу можно получить из прямой матрицы собственных векторов:
 ,
,
![]() .
.
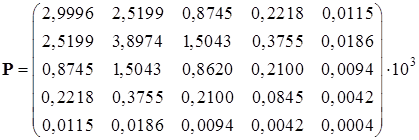
Установившееся решение уравнения Риккати, полученное с помощью скрипта Solve_Riccati_Method_Diag.m. имеет вид: