Курсовая работа: Математическая модель в пространстве состояний линейного стационарного объекта управления
Матрицы ![]() тоже аналогичны.
тоже аналогичны.
Запишем уравнение Риккати
![]() .
.
Зная, что ![]() , решаем уравнение методом обратного интегрирования на достаточно большом интервале (примерно 10 с.), получим установившееся решение с помощью скрипта
, решаем уравнение методом обратного интегрирования на достаточно большом интервале (примерно 10 с.), получим установившееся решение с помощью скрипта
Solve_Riccati_Method_Revers_Integr.m.:
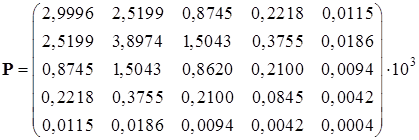
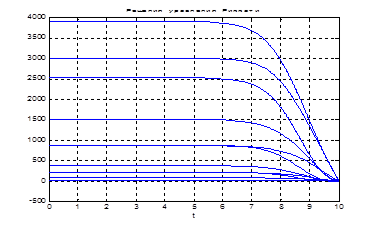
Рис.22. Графики решения уравнения Риккати.
Найдем разницу между решениями уравнения Риккати в пунктах 5.1.1 и 5.1.2:
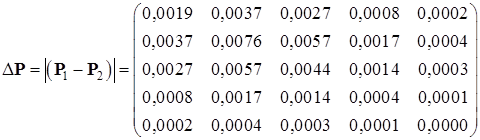
Выводы: сравнивая решения полученные в пунктах 5.1.1 и 5.1.2 можно сказать, что решения уравнения Риккати первым и вторым методами совпадают с заданной точностью. Погрешность расхождения решений невелика.
Используя скрипт AKOR_stabilizaciya_na_polybeskon_interval.m получим коэффициенты регулятора, фазовые координаты системы и управление.
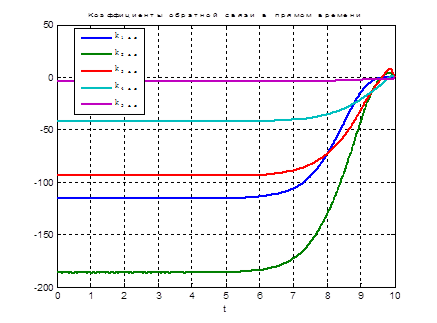
Рис.23. Графики коэффициентов регулятора обратной связи.
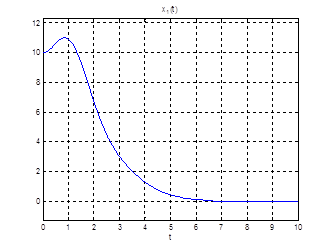
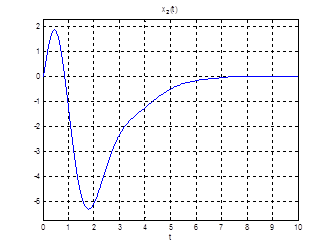
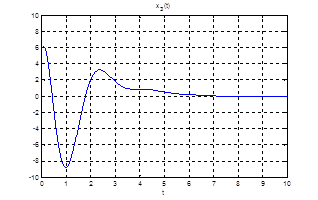
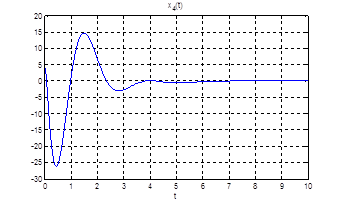
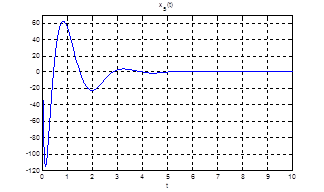
Рис.24. Графики фазовых координат.
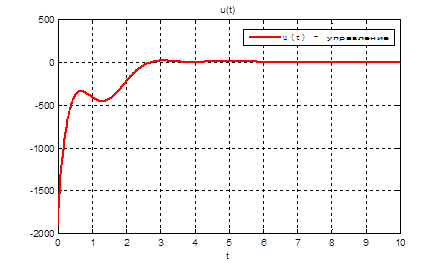
Рис.25. График управления.
Выводы: т.к. решения уравнения Риккати методом диагонализации и интегрирования в обратном времени дают практически одинаковый результат, то можно считать, что задача АКОР – стабилизации на полубесконечном интервале решена с заданной точностью.
5.2 Стабилизации объекта управления на конечном интервале времени
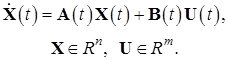
Рассмотрим линейный объект управления, описываемый системой дифференциальных уравнений в нормальной форме
Начальные условия для заданной системы ![]()
Время стабилизации ![]() .
.
Необходимо получить закон управления
![]()
минимизирующий функционал вида