Курсовая работа: Мостовые краны
Работу основных механизмов крана рассматривают по кинематическим схемам. Так как двигатели обычно имеют угловую скорость, значительно большую, чем скорость подъемного барабана или ходовых колес моста или тележки, то движение к рабочим органам механизмов крана передается через редукторы ( на рисунках обозначены буквой Р).
Для механизмов подъема наибольшее применение получили схемы с полиспастом П (рисунок 2), при помощи которого движение от барабана Б передается крюку К.
На рисунке 3 представлена схема механизма тележки, которая обычно имеет четыре ходовых колеса, два из которых, соединены валом, приводятся в движение через редуктор Р от двигателя Д.
Передача движения к ходовым колесам концевых балок от двигателя, установленного на мосту, может осуществляться через редуктор Р, расположенного в средней части моста (рисунок 4).
Каждый механизм крана имеет механический тормоз Т, который устанавливается на соединительной муфте между двигателем и редуктором или на тормозном шкиве на противоположном конце вала двигателя.
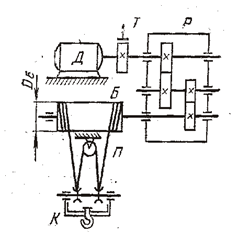
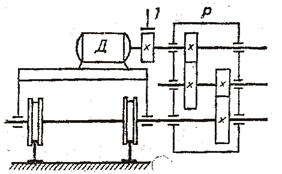
Рисунок 3. Кинематическая схема тележки
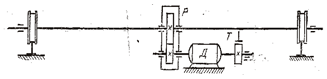
Рисунок 4. Кинематическая схема моста
3 ТРЕБОВАНИЯ К СИСТЕМЕ ЭЛКТРОПРИВОДА И ОБОСНОВАНИЯ ВЫБРАНОГО ТИПА ЭЛЕКТРОПРИВОДА.
Для выбора системы электропривода необходимо четко представлять себе технологические требования к приводу того механизма, для которого он выбирается.
Для качественного выполнения подъема, спуска и перемещения грузов электропривод крановых механизмов должен удовлетворять следующим основным требованиям:
1 Регулирование угловой скорости двигателя в сравнительно широких пределах в связи с тем, что тяжелые грузы целесообразно перемещать с меньшей скоростью, а пустой крюк или ненагруженную тележку – с большей скоростью для увеличения производительности крана. Пониженные скорости необходимы также для осуществления точной остановки транспортируемых грузов с целью ограничения ударов при их посадке и облегчают работу оператора. Обеспечение необходимой жесткости механических характеристик привода, особенно регулировочных, с тем чтобы низкие скорости почти не зависели от груза.
3 Ограничение ускорений до допустимых пределов при минимальной длительности переходных процессов. Первое условие связано с ослаблением ударов в механических передачах при выборе зазора, с предотвращением пробуксовки ходовых колес тележек и мостов, с уменьшением раскачивания подвешенного на канатах груза при интенсивном разгоне и резком торможении механизмов передвижения; второе условие необходимо для обеспечения высокой производительности крана.
4 Реверсирование электропривода и обеспечение его работы, как в двигательном режиме, так и в тормозном режиме.
4 РЕЖИМЫ РАБОТЫ ДВИГАТЕЛЕЙ КРАНА
Электродвигатели, установленные на кранах, работают в тяжелых условиях, часто в помещениях с повышенной температурой или с большим содержанием в них паров и газов, а также на открытом воздухе. Мостовые краны имеют повторно-кратковременный режим работы, с частыми пусками и торможениями.
Повторно - кратковременный режим – это режим работы двигателя, при котором рабочие периоды tраб чередуются с периодами отключения t0 .
Повторно - кратковременный режим работы характеризуется относительной продолжительностью включения (ПВ).
![]()
где, tраб – время работы (с)
tц – время цикла (с)
Номинальное значение относительной продолжительности включения – 15, 25, 40, 60%.
Рассмотрим режимы работы двигателей, которые представлены на рисунке 5.
Двигатели механизмов моста и тележки при работе с грузом и без груза работают в нормальном двигательном режиме.
При подъеме груза или пустого крюка двигатель подъемного механизма работает в двигательном режиме, а при опускании груза возможны два случая:
- если момент груза Мгр больше момента двигателя Мдв , то груз будет опускаться под действием собственного веса с учетом момента трения Мтр и электродвигатель должен быть включен на подъем, чтобы подтормаживать груз, то есть в этом случае момент двигателя равен
Мдв = Мгр - Мтр
Такой режим называется тормозным спуском.
- если момент груза будет меньше момента трения, то электродвигатель должен быть включен на спуск и способствовать опусканию груза, то есть работать в двигательном режиме, в этом случае момент двигателя равен
дв = Мтр - Мгр
Такой режим называется силовым спуском.
|
|
|

|