Курсовая работа: Обработка информации и принятие решения в системах ближней локации
N2=26000;
x=tr_t200 (N1:N2); %вырезали фрагмент сигнала
r=xcorr(x, x); %Вычисление корреляционной функции
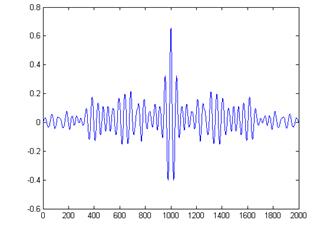
Рисунок 13 – График исходного сигнала гусеничной техники
Для сигнала гусеничной техники выбираем наиболее информативный участок от 54000 до 55000.
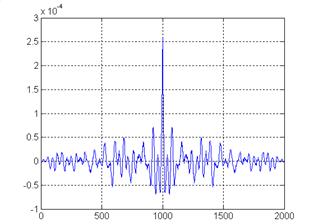
Рисунок 14 – График исходного фонового сигнала
Для фонового сигнала выбираем наиболее информативный участок то 45000 до 46000.
Для сигнала гусеничной техники:
h1=tr_t200 (54000:55000);% вырезали фрагмент
k=1000;
KF=xcorr (h1, h1, k);% КФ
k1=-k:k; plot (k1, KF);%построили КФ
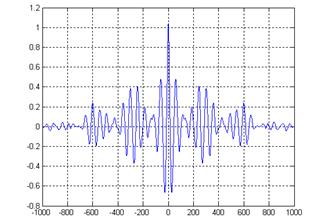
Рисунок 15 – График корреляционной функции сигнала гусеничной техники
Вывод: График имеет квазипериодический характер. Повтор явных всплесков колебаний через каждые 250÷300 отсчетов. По корреляционной функции также можно сказать, что сигнал имеет колебательный случайный характер. Так же можно сказать, что функция не стационарна, так как дисперсия ее не постоянна. Период колебания корреляционной функции сигнала гусеничной техники составляет примерно 290 отсчетов (0.58 с).
Для фонового сигнала:
h2=fon(15000:16000);% вырезали фрагмент
k=1000;
KF=xcorr (h2, h2, k);% КФ
k1=-k:k; plot (k1, KF);%построили КФ
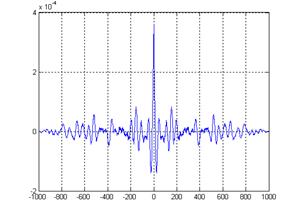
Рисунок 16 – График корреляционной функции фонового сигнала
Вывод: по корреляционной функции для фонового сигнала можно сказать, что сигнал имеет колебательный случайный характер. Так же можно сказать, что функция не стационарна, так как дисперсия ее не постоянна. Период колебания корреляционной функции фонового сигнала составляет приблизительно 190 отсчетов.
2. Формирование обучающих и контрольных множеств данных
2.1 Признаки по оценке спектра мощности сигнала в восьми интервалах частот
Теоретический раздел
При обнаружении и распознавании объектов по сейсмическим сигналам возникает задача выбора признаков.