Курсовая работа: Обработка информации и принятие решения в системах ближней локации
Пропускаем сигналы через формирование матрицы признаков:
x=tr_t200;
N1=1024;
N2=512;
fs=500;
Mt=MATRPRIZP (x, fs, N1, N2);
x=fon;
N1=1024;
N2=512;
fs=500;
Mf=MATRPRIZP (x, fs, N1, N2);
Получим графические представления матриц признаков:
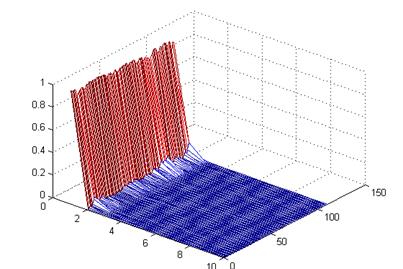
Рисунок 17 – Графическое представление матрицы признаков сигнала гусеничной техники
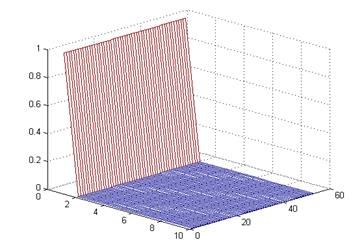
Рисунок18 – Графическое представление матрицы признаков фонового сигнала
3 Исследование признаков
Практическая часть
Для обучающей матрицы произвести исследование признаков по следующей программе: 1) Оценить параметры распределения признаков; 2) По каждому признаку обучающей матрицы вычислить расстояние. Для данного признака сформулировать решающее правило задачи обнаружения.
3.1 Оценка параметров распределения признаков. Определение информативного признака с максимальным расстоянием, построение функций плотности распределения вероятностей и вычисление порога принятия решения, формулирование решающего правила
Загружаем сигнал в рабочее пространство:
h1=fon-mean(fon);
h2=tr_t200-mean (tr_t200);
N1=1024;
N2=512;
fs=500;
Пропускаем сигнал через решетку фильтров Батерворда:
[M, Mf]=MATRPRIZP (h1,500, N1, N2);
[M, Mt]=MATRPRIZP (h2,500, N1, N2);