Курсовая работа: Параметрическая идентификация динамических характеристик процесса формования изделий из композитов в автоклаве
где ![]() и
и ![]()
- коэффициент при пропорциональной и интегральной части.
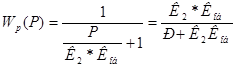
Разомкнутая система регулирования имеет передаточные функции:
![]()
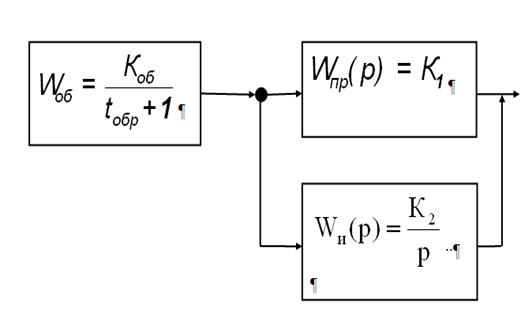
Рисунок 1 - Разомкнутая система регулирования.
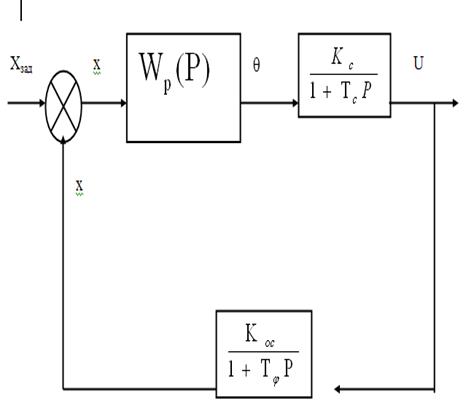
Рисунок 2 - Замкнутая система регулирования.
p– оператор Лапласа.
Только при условиях ![]() передаточная функция системы экспоненциальная, т.е. наиболее устойчива.
передаточная функция системы экспоненциальная, т.е. наиболее устойчива.
Если ![]() то передаточная функция примет вид:
то передаточная функция примет вид:
![]()
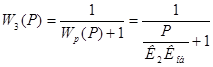
Передаточная функция замкнутой системы регулирования
По аналогии передаточной функции RС фильтра коэффициент при операторе ф - постоянная времени.
Считаем что ![]()
Таким образом, имеются следующие выражения для определения отношения К1 и К2
![]()
![]()
![]() ;
; ![]()
Отсюда
![]()
![]()
![]() ;
;
г) Интегральная составляющая в ЭВМ вычисляется как выходная величина интегратора, на вход которого подана решетчатая функция DТ(t) значения которой фиксируются в моменты времени tn= Ту.
Ту - время между двумя измерениями температуры объекта.
Выходная величина интегратора запишется в виде выражения:
![]()
Для выражения Ки через К1 и К2 (3) приравняем выражение (4) и интегральную составляющую из (2) в значениях температуры:


![]()
Этот безразмерный коэффициент используется в программе для деления интегральной составляющей по (4).д) При выбранных К1 и К2 и полученному из (5) Кд оценивается качество регулирования системы по трем показателей: