Курсовая работа: Построение математической модели оптимального управления обеспечивающего мягкую посадку при
![]() кг/с.
кг/с.
Наш критерий оптимизации ![]() . Введем принятые в исходных данных обозначения:
. Введем принятые в исходных данных обозначения:
![]() ;
; ![]() .
.
Начальный момент времени t=0, конечный момент времени – момент посадки КА (момент столкновения с планетой) t=T.
 ;
;
Тогда критерий оптимизации:
 ;
;
 . (Здесь
. (Здесь  .)
.)
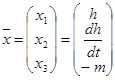
Теперь необходимо написать уравнение состояния системы. Для этого нужно ввести переменные состояния и входную переменную.
Порядок дифференциального уравнения n=3, отсюда 3 уравнения состояния:
![]() ;
;
![]() ;
;
![]() .
.
Выберем управление:
![]() ;
;
Подставляем уравнения состояния, получим:
так как ![]() и
и ![]() , отсюда
, отсюда
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() .
.
Критерий оптимизации:
 .
.
Введем переменные х0 и хn+1 (то есть х4 ).
 , где t – текущее время.
, где t – текущее время.
![]() .
.
Тогда основные уравнения состояния:
![]()
![]()
![]()
![]()
![]()
![]()
![]()