Курсовая работа: Проектирование и исследование механизмов инерционного конвейера
Министерство образования РБ
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра теоретической механики
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К КУРСОВОМУ ПРОЕКТУ
По дисциплине теория механизмов и машин
Тема:
Проектирование и исследование механизмов инерционного конвейера
Выполнил: студент 3 курса
ф-та ТТЛП, группа ММД - 6
Ивасюта В.П.
Проверил: Ласовский Р.Н.
Минск 2003
Принцип действия инерционного конвейера
Инерционный конвейер предназначен для перемещения грузов в горизонтальном направлении. Транспортер 5 конвейера совершает возвратно-поступательное движение с помощью шарнирного четырехзвенника с кривошипом 1, шатуном 2 и коромыслом 3, к которому прикреплен поводок 4. Привод состоит из электродвигателя М1, планетарного зубчатого механизма ПР, зубчатой передачи Z11-Z12 (рис. 1). На оси кривошипа 1 установлен маховик МАХ, являющийся аккумулятором кинетической энергии и обеспечивающий заданный коэффициент неравномерности движения механизма. Изделия 9 поступает на транспортер 5 из накопителя, под управлением кулачкового механизма 7-8 и перемещается за счет сил сцепления при отсутствии относительного движения.
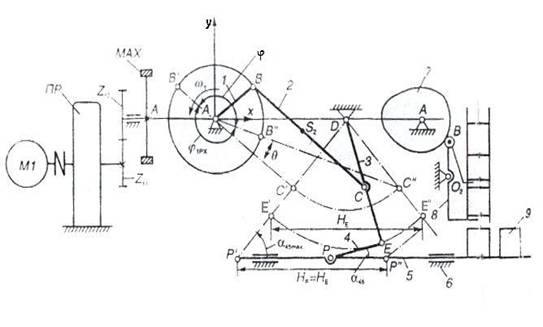
Рис 1. Инерционный конвейер
ВВЕДЕНИЕ
В данном разделе рассматриваются структурный анализ и структурный синтез рычажного механизма.
При анализе определяют число подвижных звеньев механизма, число и класс кинематических пар и число степеней свободы механизма.
В задачу синтеза входит проектирование по заданным условиям структурной схемы механизма. Следует отличать структурную схему механизма от кинематической. В структурной схеме указываются стойка, виды кинематических пар и их взаимное расположение в механизме. Размеры звеньев не учитываются. Составление структурной схемы механизма необходимо в первую очередь для проведения структурного анализа механизма. В кинематической схеме известны размеры, необходимые для кинематического анализа, силового расчета механизма и дальнейшей разработки его конструкции.
Также в данном разделе определяем число степеней свободы механизма. Числом степеней свободы механизма является число независимых параметров, однозначно определяющих положения всех звеньев механизма относительно стойки, например угловые и линейные координаты звеньев. Их называют обобщенными координатами механизма. Звено, которому приписывается одна или несколько обобщенных координат механизма, называют начальным. В механизме с одной степенью свободы – одно начальное звено, а за обобщенную принимают его угловую координату (если звено вращается) или линейную (если звено движется прямолинейно).
В данном курсовом проекте представлены расчеты по проектированию и синтезу пятизвенного рычажного механизма, в основе которого лежит кулисный. Принципиальная схема этого механизма представлена на рис. 2.
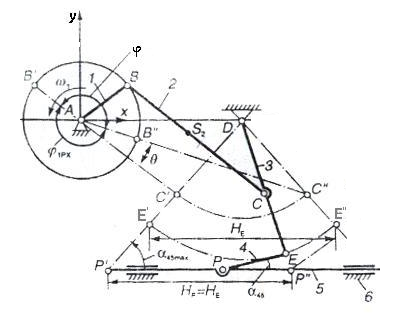
Рис. 2 Схема рычажного механизма
1. Исходные данные
Длина хода транспортёра ……………………….…Нр=0.25 м
Угол качения коромысла 3…………………...........β3= 650
Максимальное значение угла давления
между поводком 4 и ползуном 5 ………………… d =100
--> ЧИТАТЬ ПОЛНОСТЬЮ <--